
ImmersionRC Vortexは本格的なFPVレーシングドローンの完成品として2015年の春に発売された機体でモーターを搭載する4本の足が折りたたみ可能となっているのが特徴的です。本格FPVドローンメーカーによる製品ということもあり完成度が高く、この機種を購入して受信機を接続すれば初心者でもすぐにFPVでスムーズな飛行を楽しむことが可能です。
ここではVortexを購入してから飛行できるようにするまでに一連の設定作業について記述します。
まずはじめにすることはコントロール用受信機の接続です。Vortexが受け取ることのできる情報はPPMのみですのでPPMに対応した受信機を使用するかSBUS等他の形式で受信した信号をPPMに変換するアダプタを用いる必要があります。
ここでは日本で使用することを想定して日本で使用可能なフタバのコントローラーの信号を受信してPPMを出力することのできるFrSky Delta-8受信機を使用します。
設定の流れは以下のようになります。危険防止のため機体の設定が完全に終わり試験飛行を行う段階までプロペラは取り付けないようにしましょう。
1 受信機の設定
 Delta-8の出力としてPPM信号を利用するには3番4番の信号端子を付属のピンでジャンパします。
Delta-8の出力としてPPM信号を利用するには3番4番の信号端子を付属のピンでジャンパします。
フタバの送信機を使用する場合は7,8の一番上のピンをジャンパします。
受信機接続用の配線が機体後方上部から出ていますので受信機のPPM出力ポートである1番に接続します。この際上から白赤黒の順番になります。
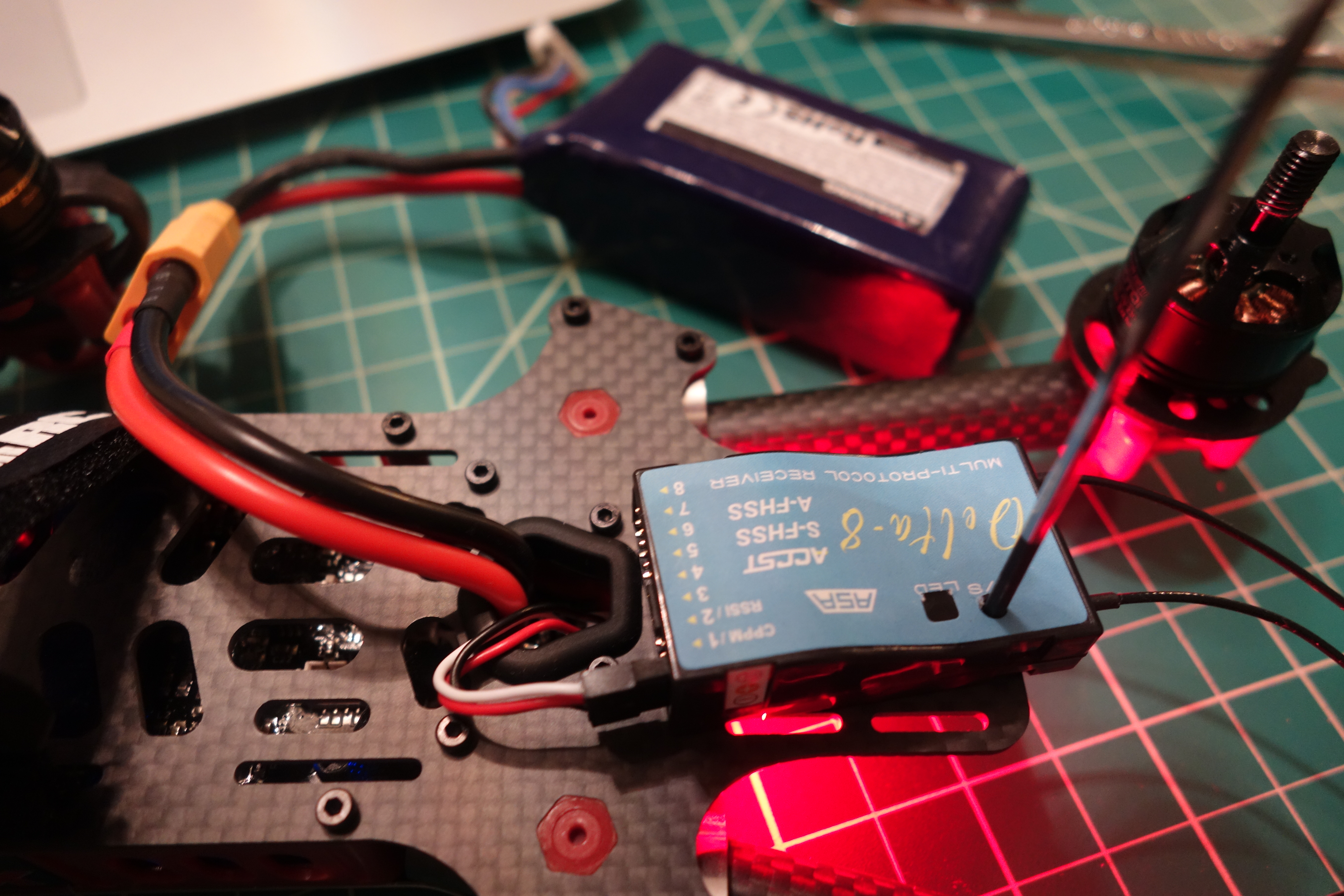 受信機とコントローラーのリンクを設定します。Delta-8の場合はコントローラー側の設定画面でリンク待機状態にしておき受信機上面にあるボタンを押しながらクワッド本体にバッテリーを接続します。Delta-8の場合あらかじめ対応する送信機に応じてジャンパを設定しておきます。またリンクの確立にかなり時間がかかりますので指定のプロトコルでリンクが確立されることがLEDの表示で確認できるまでしっかりとボタンを押しておきます。リンクの確立が確認できたら一度バッテリーを切り送信機の電源も一度オフにしてからそれぞれの電源を入れ直します。
受信機とコントローラーのリンクを設定します。Delta-8の場合はコントローラー側の設定画面でリンク待機状態にしておき受信機上面にあるボタンを押しながらクワッド本体にバッテリーを接続します。Delta-8の場合あらかじめ対応する送信機に応じてジャンパを設定しておきます。またリンクの確立にかなり時間がかかりますので指定のプロトコルでリンクが確立されることがLEDの表示で確認できるまでしっかりとボタンを押しておきます。リンクの確立が確認できたら一度バッテリーを切り送信機の電源も一度オフにしてからそれぞれの電源を入れ直します。
2 OSDによる初期設定
次にOSDメニューによる初期設定を行います。VortexのメリットとしてOSD上で様々な設定変更が行うことができます。設定の一部は後ほど説明するCleanFlightというソフトウェアで行いますが基本的な初期設定はこのOSDから行います。このOSDからの初期設定が完了しないとCleanFlightの設定を行ったとしても全てリセットされます。
OSDメニューによる初期設定はFPV用のモニタまたはゴーグルとコントローラー(プロポ)を使用して行います。
FPVモニタを用意して電源を入れると画面にTxセットアップウイザードが表示されます。デフォルトの周波数5740Mhz(FatSharkの1Ch)ですので表示されない場合は受信機の周波数を合わせます。
画面のウィザードの指示にしたかがってコントローラーのスティックを上下左右に動かせばスティック動作の設定とキャリブレーション(調整)が完了します。
3 CleanFlightによる初期設定
VortexはフライトコントローラーソフトウェアとしてCleanFlightを利用していますので、各種設定をCleanFlight Configurator用いて行うことができます。ここではフライトモードの切り替えスイッチとアーミング(モーターのマスター)スイッチの設定を行います。
まずコントローラ側の設定でCh5に3つのフライトモードを切り替えるための3点スイッチを設定します。Ch6にアーミング用に使用するスイッチを設定しておきます。
 CleanFlight ConfiguratorはパソコンのブラウザであるChrome上で動作するCromeアプリとして実装されています。ブラウザのChromeでCleanFlightを検索するとCromeアプリストアが出てきますのでChromeに追加します。
CleanFlight ConfiguratorはパソコンのブラウザであるChrome上で動作するCromeアプリとして実装されています。ブラウザのChromeでCleanFlightを検索するとCromeアプリストアが出てきますのでChromeに追加します。
Cleanflight – Configurator
https://chrome.google.com/webstore/detail/cleanflight-configurator/enacoimjcgeinfnnnpajinjgmkahmfgb
Vortexとパソコンの接続はUSBケーブルを用いて行いますが、USBを使用してシリアル通信するためのドライバが必要となりますのでこちらもインストールします。
CP210x USB to UART Bridge VCP Drivers
http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx
ドライバとCleanFlightのインストールが完了したらCleanFlightを起動した状態でUSBケーブルをVortexの後部のマイクロUSB端子に接続します。Vortexの接続が完了したらモード設定画面でフライトモード切り替えの設定を行います。AUX1にCh5のスイッチがAUX2にCh6のスイッチが対応しているかと思います。
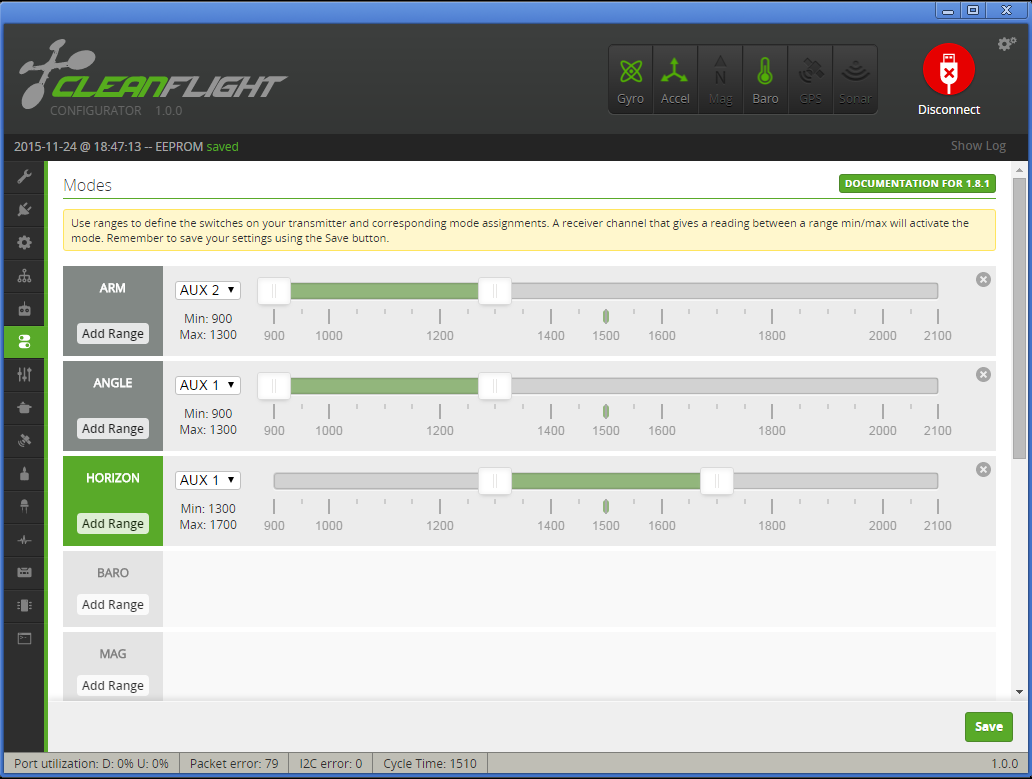
まずモード切り替えに使用したいスイッチを動かしてみて、それぞれの位置に対して指定したいモードの緑の範囲に収まるように設定します。この例ではAUX1スイッチでフライトモードを切り替えており、一番奥でAngleモード(最も安定した飛行が可能なモード)、中立でHorizonモード(安定性と機動性を両立したモード)、手前にするとこの画面上は指定がありませんがRateモードと呼ばれる最も機動性の高いモードとなるように設定しています。
またARMスイッチとしてAux2を指定しスイッチを一番奥の状態でARMがONでモーターが回転、それ以外ではARM OFFとしてモーターが回らない設定としています。
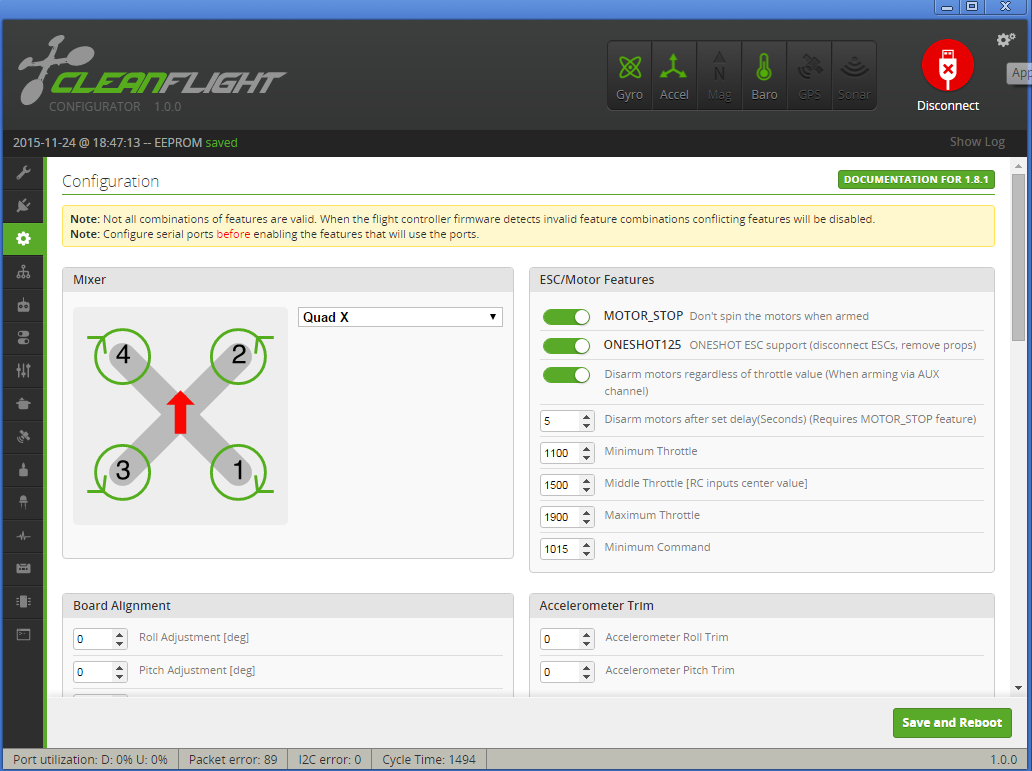
次にConfiguration画面でARMスイッチに関連する動作の設定を行います。
右上のESC/Moter FeatureのMOTOR_STOPをOFFとなっていることを確認します。これがONの場合はARMをONにしてもすぐにモーターは回転しません。ONの設定だとARMがONになっていることに気がつきにくく危険ですのでOFFと設定することをお勧めします。3つ目の「Disarm motors ….」という項目はON(緑)にしておきます。これはARMスイッチがOFFにされた場合にスロットルの位置にかかわらずモーターを停止させる設定です。緊急時にすぐにモーターの回転を止めることができるので重要な設定です。
4 送信機のエンドポイントの設定
CleanflightのメニューからReceiverを選択し送信機のスティック操作に対応してフライトコントローラーに送られる信号に関する設定を行います。まず左上のChannerl Mapで各スティックと機体動作の対応付けを行います。フタバ製送信機Mode2マッピングの場合は「AETR1234」となります。AETRは飛行機でいうエルロン(Aileron), エレベーター(Elevator), スロットル(Throttle), ラダー(Rudder)の操作に対応します。
次に送信機側のエンドポイント設定によって各スティックに対応する出力が最小値1000から最大値2000程度になるようにプロポのエンドポイントを調整します。
5 受信機のフェイルセーフ機能の設定
受信機が送信機(プロポ)からの操作信号を受信できなくなった際に自動的にモーターをオフにするための設定を行います。以下ではDelta-8の場合の設定要領を記載します。各受信機毎の設定要領についてはそれぞれの説明書を参照してください。プロペラを取り付けたまま作業を行うと危険ですので必ずプロペラを外した状態で行います。送信機の電源を入れ、機体のバッテリーを接続した状態でスロットルをあげて各モーターが回転することを確認します。ある程度モーターが回転している状態で送信機の電源を切ります。フェイルセーフの設定がされていればモーターは停止しますが回転を続ける場合はフェイルセーフの設定が必要です。再度送信機の電源を入れ受信機とのリンクを確立します。信号が受信できなくなった場合に設定したいスティックの状態(通常はスロットル最小その他はニュートラル)にします。この状態で受信機上部にあるフェールセーフボタン(リンク設定ボタンと同じ)を5秒間押します。フェイルセーフの設定が完了したら先ほどの要領でモーター回転中に受信機の電源を切りモーターが停止することを確認します。
6 受信機の取り付け
ここまでの設定が一通り終わったら受信機を機体に固定します。また受信機に接続されているアンテナも取り付けます。
機体後方に受信機用のスペースがありますのでここに両面テープや結束バンドなどを使って固定します。この際アンテナを取り付け可能な位置であることをあらかじめ確認しておきます。
 受信機用のアンテナは2本のワイアが出ていますのでこれを結束バンドやヒートシュリンクチューブ、ストロー等を使って支えます。通常小型クワッドであれば上部に2本のアンテナを90度以上の角度をつけて取り付けるのが一般的なのですが、Vortexの場合足のアームが墜落時に折りたたまれてアンテナを切断することがありますので足のアームが折りたたまれてもアンテナに接触しないよう後部下方に伸ばすようにしています。これで後方のプロペラによるアンテナ切断はかなり少なくなります。またVortexの後ろプロペラを支えるステーは折りたたまれますがこれによってLED部を損傷したりする原因となるようなのでステーの付け根部分を結束バンド等で縛っておくと墜落時の機体へのダメージを和らげることが可能です。
受信機用のアンテナは2本のワイアが出ていますのでこれを結束バンドやヒートシュリンクチューブ、ストロー等を使って支えます。通常小型クワッドであれば上部に2本のアンテナを90度以上の角度をつけて取り付けるのが一般的なのですが、Vortexの場合足のアームが墜落時に折りたたまれてアンテナを切断することがありますので足のアームが折りたたまれてもアンテナに接触しないよう後部下方に伸ばすようにしています。これで後方のプロペラによるアンテナ切断はかなり少なくなります。またVortexの後ろプロペラを支えるステーは折りたたまれますがこれによってLED部を損傷したりする原因となるようなのでステーの付け根部分を結束バンド等で縛っておくと墜落時の機体へのダメージを和らげることが可能です。
7 飛行前の準備
プロペラをつけない状態でモータを回転させてコントローラーでイメージする要領で回転が制御されていることを確認します。各種部品等の取り付けや接続を確認し問題がなければプロペラを取り付けます。プロペラはCW(時計回り), CCW(反時計回り)のものがありますので逆につけないよう気をつけます。
機体の前方、後方でそれぞれプロペラが外側から内側に向かって回転しますのでその回転方向とプロペラをつけた時にどちらにプロペラが浮力を発生するかをイメージしながら取り付けを行うと間違いにくいと思います。
8 試験フライト
試験飛行はまずはまずは最も安定するAngleモードを使用して行うと良いでしょう。また初めてこのタイプのドローンを操縦する人の場合は、コントローラー側の出力(エンドポイント)についてスロットル以外の可動範囲を50%程度から始めて飛行感覚に慣れてきたらエンドポイントの幅を広げ)て行き、さらにモードをAngle→Horizon→Acroとステップアップをしていくのが良いかと思います。