Eachine Racer 250はOSDを含むFPVを装備した250mmクラスのFPVクワッド機として2015年の夏に$150(1万8千円程度)という驚きの低価格で発売され、その価格に対して十分な性能を発揮するものとしてFPVコミュニティの中でも一定の評価を受けています。私も一台試しに購入してみましたのでその設定方法と簡単なレビューを掲載しておきます。
まず数日使用してみての感想としては安価な機体でとりあえず受信機を設定して飛ばすことができるという意味で悪くはないかと思います。ただ、デフォルトのPIDでは飛行がふらつき安定しないのでチューニングが必要となります。本ページやネット上に掲載されているPID値を参考にしてその値を設定してとりあえず飛ばすことはできるかと思いますが、機体の個体差などもあり必ずしも安定的な飛行が可能とも限りませんのでご注意ください。
本機のメリットとしては何より安い、完成品である、OSDやLEDなどが最初から付いている、適切なPIDを設定すれば安定した飛行が可能であるといったことが挙げられます。デメリットとしては、あまり速く飛べるわけではない、バッテリーの消耗が比較的早い、個々のパーツについて後々不満が残るといった点が挙げられます。
何より価格が安いということがありますのでとりあえず何でも良いから安く手っ取り早くFPVクワッドを購入したい場合や、予備機として使用するなどの場合に向いているかと思います。
Eachine Racer 250 (Banggood.com)

Eachine Racer 250はBNF(Bind aNd Fly)完成品として届きますので、基本的にはプロポ(送信機)と受信機の設定さえ済ませれば飛行させることが可能です。ただ前述の通りデフォルト設定のままでは飛行特性が今ひとつということもあってPIDチューニングが必要です。
フライトコントローラーはCC3Dが搭載されており受信機からはPWMまたはPPMの形で制御信号を受け取ることが可能です。私は手元にあったFrSky Delta-8をPPM接続しました。
設定の流れは以下のようになります。本機はFPV用のアンテナを接続せずにバッテリーを接続すると壊れるらしいので必ずアンテナはつけた状態にしておくのが良いかと思います。また、危険防止のため機体の設定が完全に終わり試験飛行を行う段階までプロペラは取り付けないようにします。
1 受信機を付属のケーブルでフライトコントローラー(CC3D)に接続。
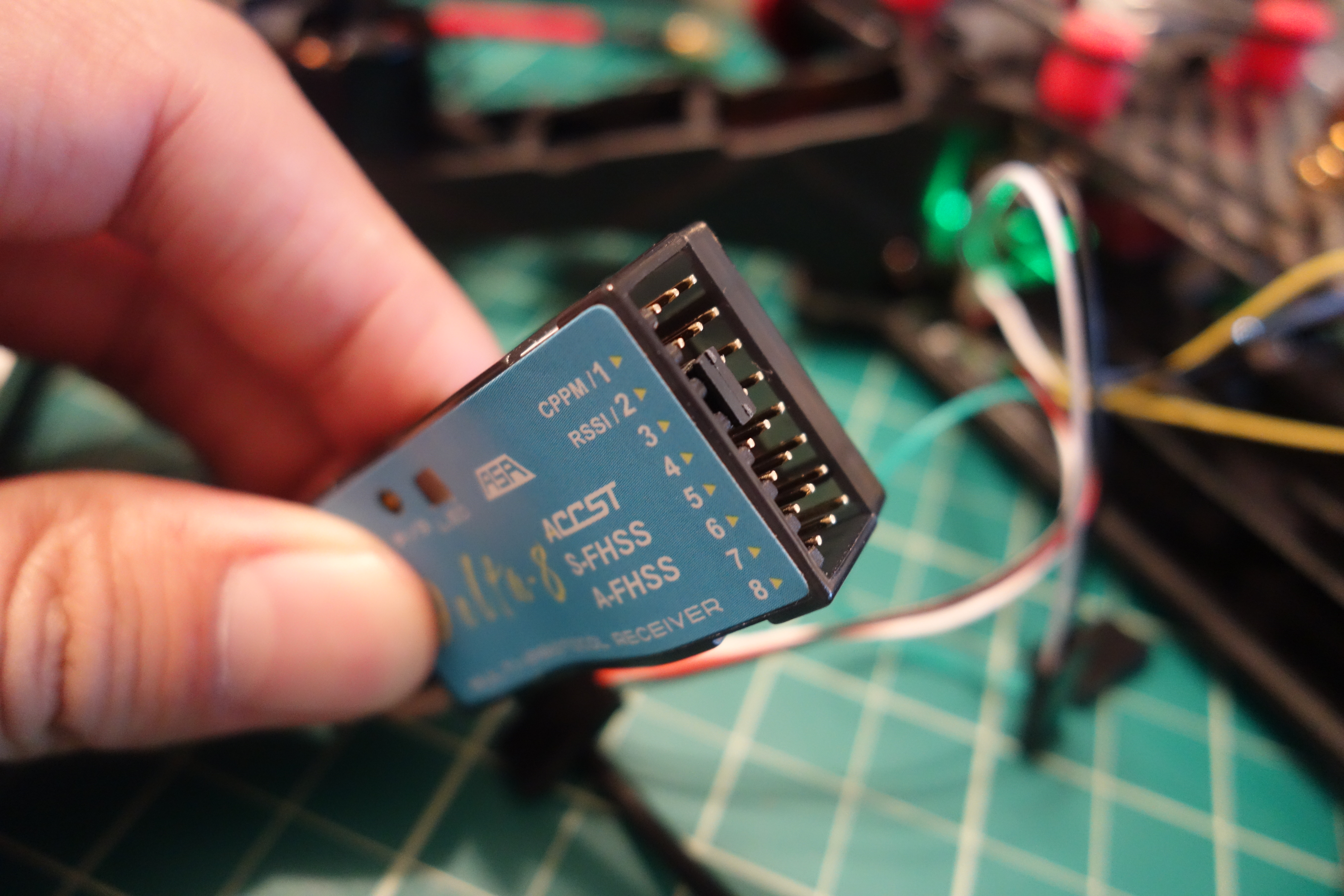
Delta-8の出力としてPPM信号を利用するには3番4番の信号端子を付属のピンでジャンパします。
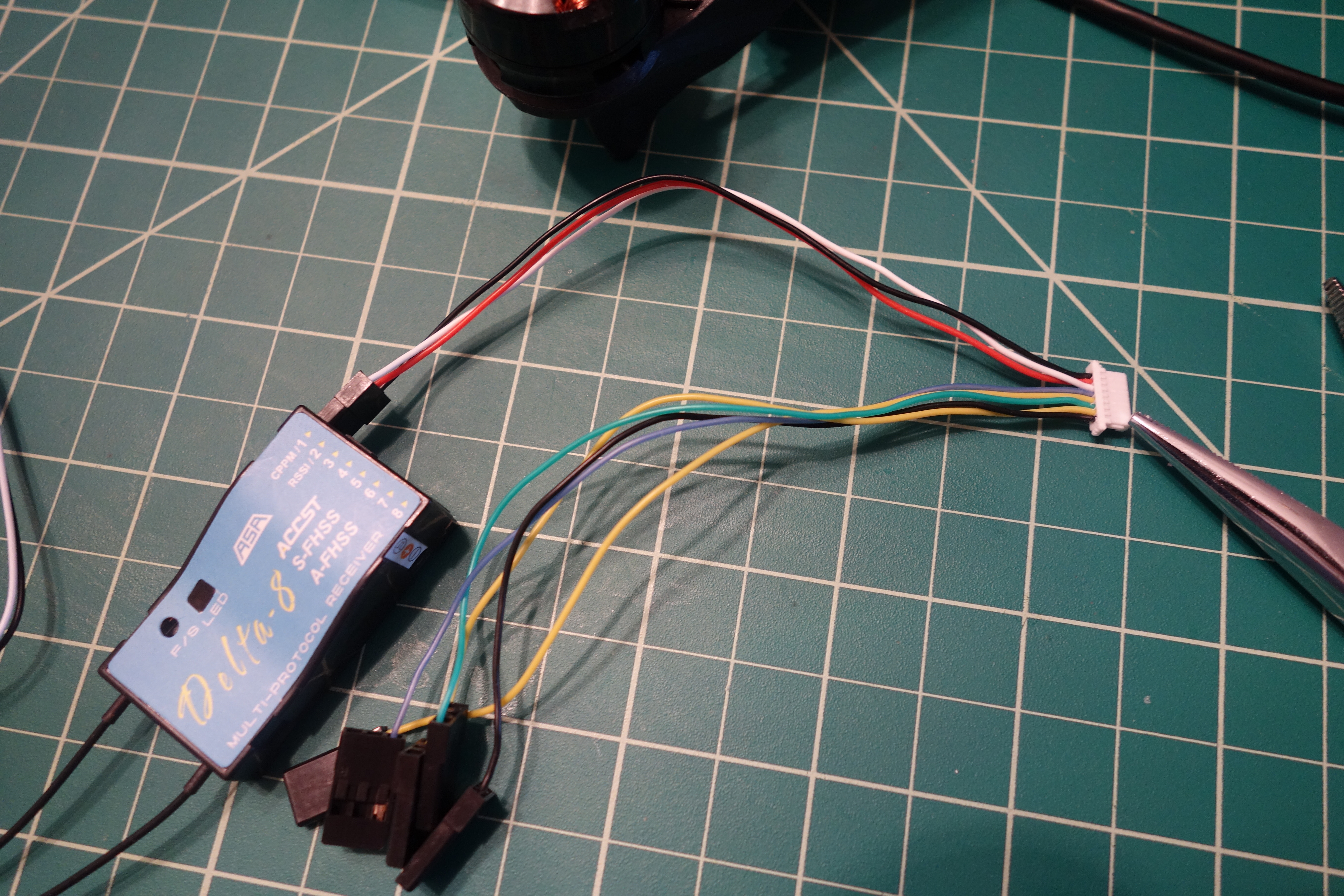
付属のケーブルはPWM用のものですので各チャンネル毎の信号線が付いています。各チャンネル毎にPWMで接続する場合は各チャンネルに対応するカラーのラインを受信機の対応するチャンネル端子に接続します。今回はPPM接続をしますので1番端子にケーブルの向きを間違わないように接続します。下から黒がマイナス、赤がプラス、白が信号線となります。
余った信号線はソケットから抜いてしまって構わないのですが、私の場合は後でPWM接続するかもしれないのでとりあえずそのまま置いておきました。
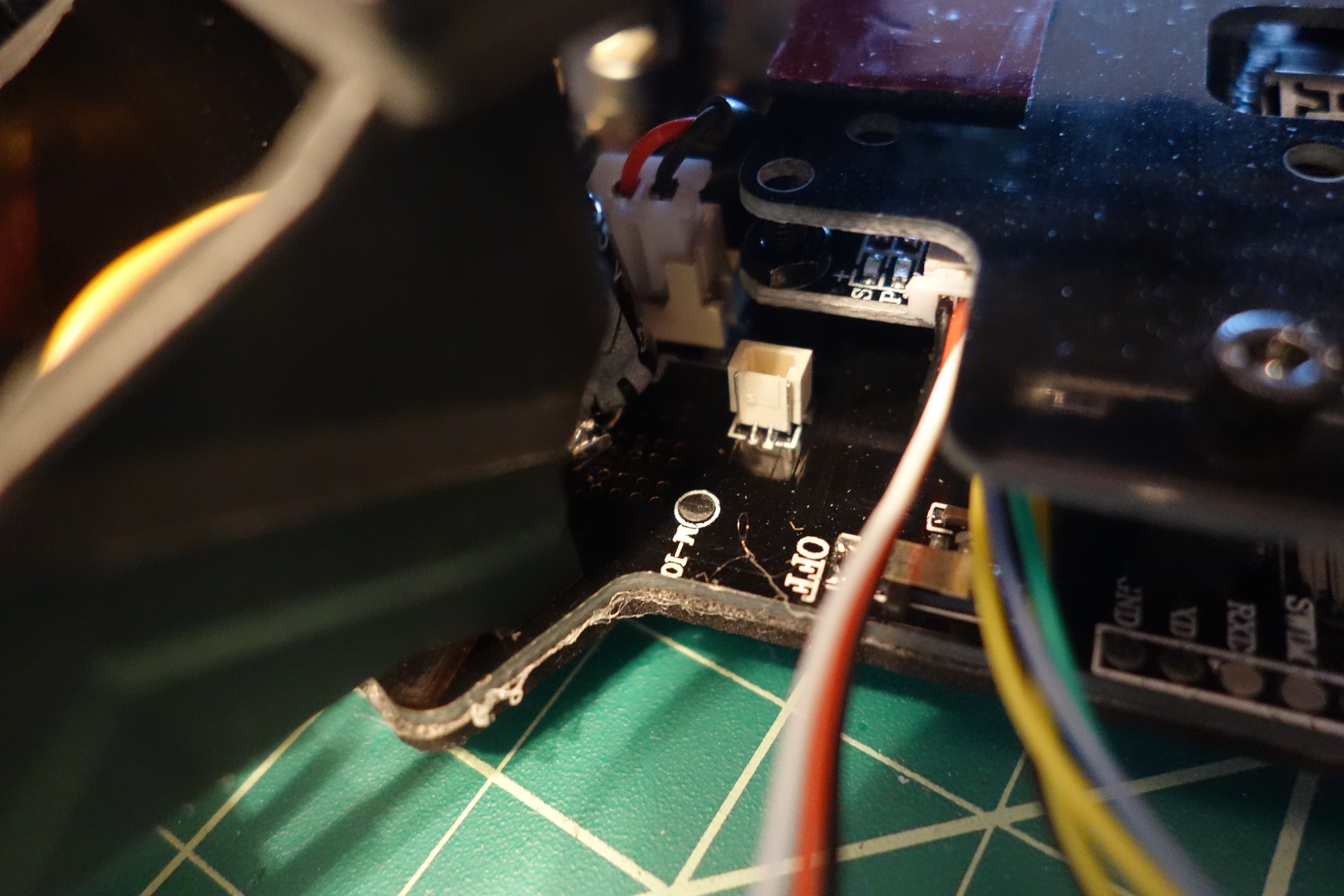
2 機体LED ON/OFFの設定
機体前方と後方のLEDのON/OFFを送信機のスイッチで制御できるように設定します。LEDのスイッチは下の写真中央の白いソケットになります。付属のケーブルを用いてこのソケットと受信機のch6を接続します。プロポの設定で任意のスイッチを割り当てます。スイッチは一度のONで点灯、再度ONにすることで消灯する方式なので自動で戻るタイプのスイッチを割り当てるのが良いかと思います。
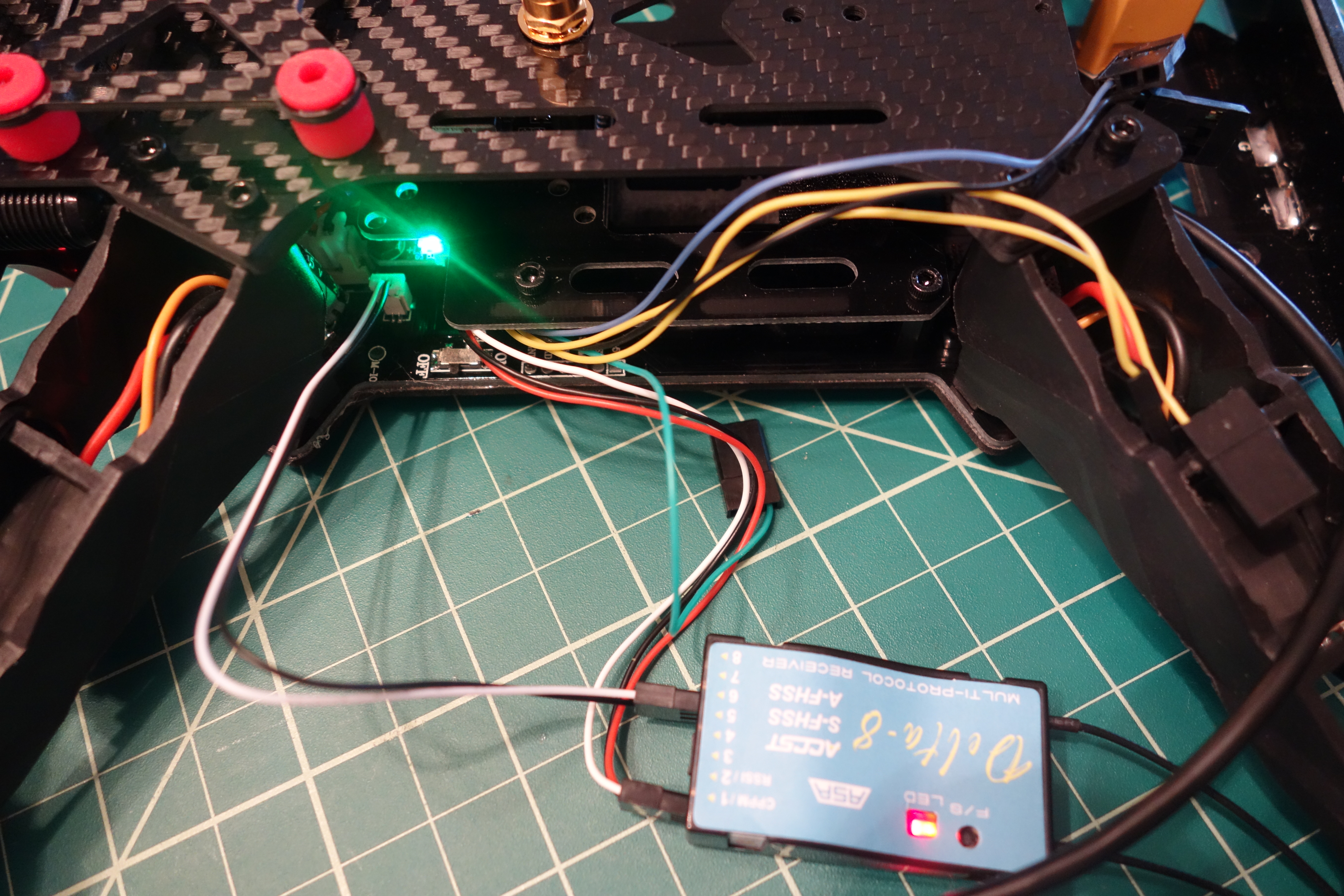
3 受信機とプロポとのリンクを設定
受信機とプロポのリンクを設定します。Delta-8の場合はプロポ側の設定画面でリンク待機状態にしておき受信機上面にあるボタンを押しながらクワッド本体の電源を入れます。(バッテリーを接続します。)Delta-8の場合あらかじめ対応する送信機に応じてジャンパを設定しておきます。またリンクの確立にかなり時間がかかりますので指定のプロトコルでリンクが確立されることがLEDの表示で確認できるまでしっかりとボタンを押しておきます。リンクの確立が確認できたら一度バッテリーを切り送信機の電源も一度オフにしてからそれぞれの電源を入れ直します。
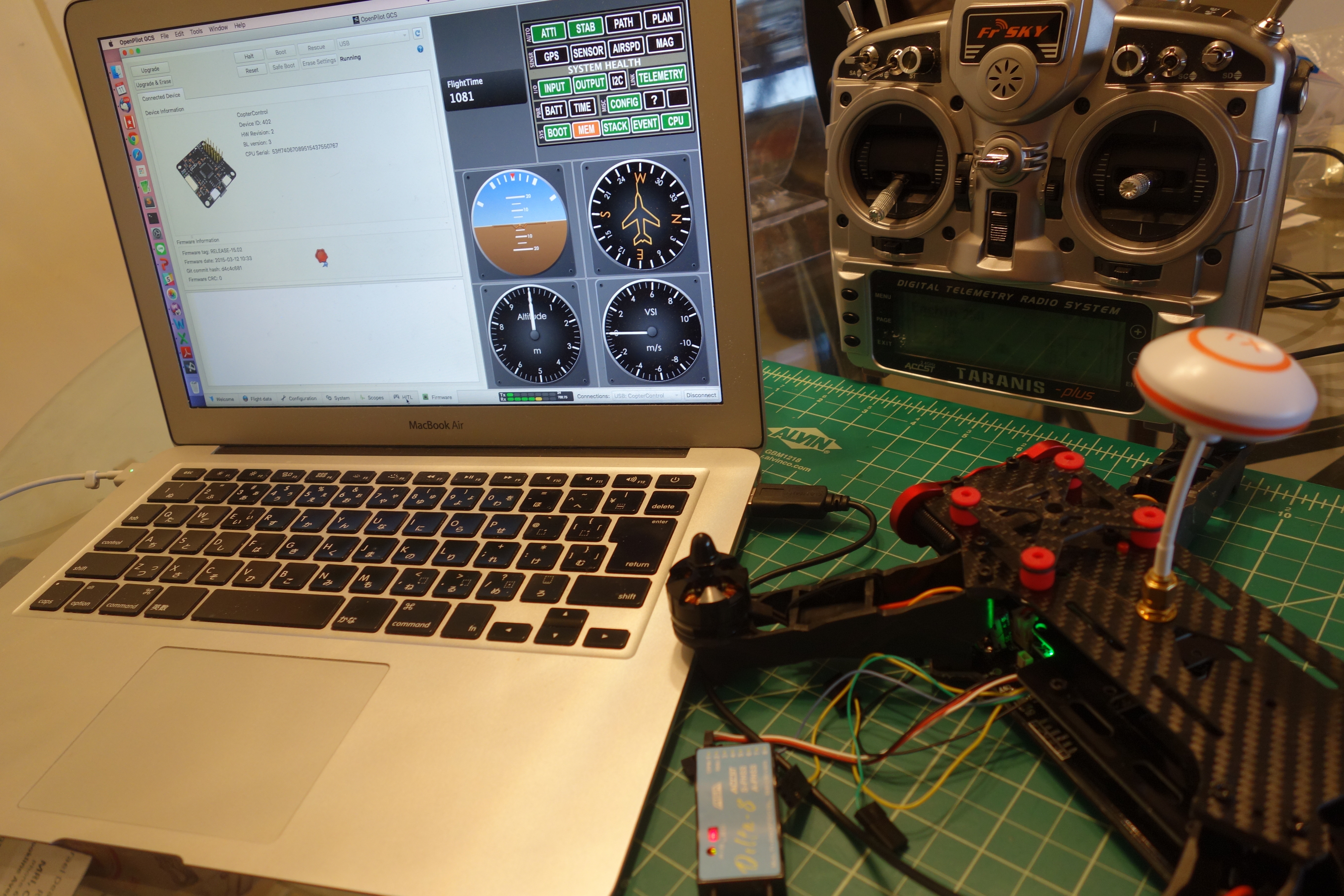
4 Open Pilot GCSを用いてフライトコントローラーの各種パラメーターの設定
OpenPilot GCS(Ground Control Station)はパソコンを用いてCC3Dの各種設定を行うためのアプリケーションとなります。パソコンにOpen Pilot GCSをインストールをしUSBとCC3DのミニUSBをケーブルで接続します。
OpenPilot GCS
https://www.openpilot.org/download/
OpenPilot GCSによるCC3Dの設定はドローン本体をバッテリー接続しなくても行える部分もありますが、今回は受信機の動作及び信号が必要となりますので、ここでは送信機及びバッテリー接続も行います。
メニュー(アイコン)または下部のタブからConfiguratoinを選択します。以下特に記述のない箇所はデフォルトの設定値のままで結構です。
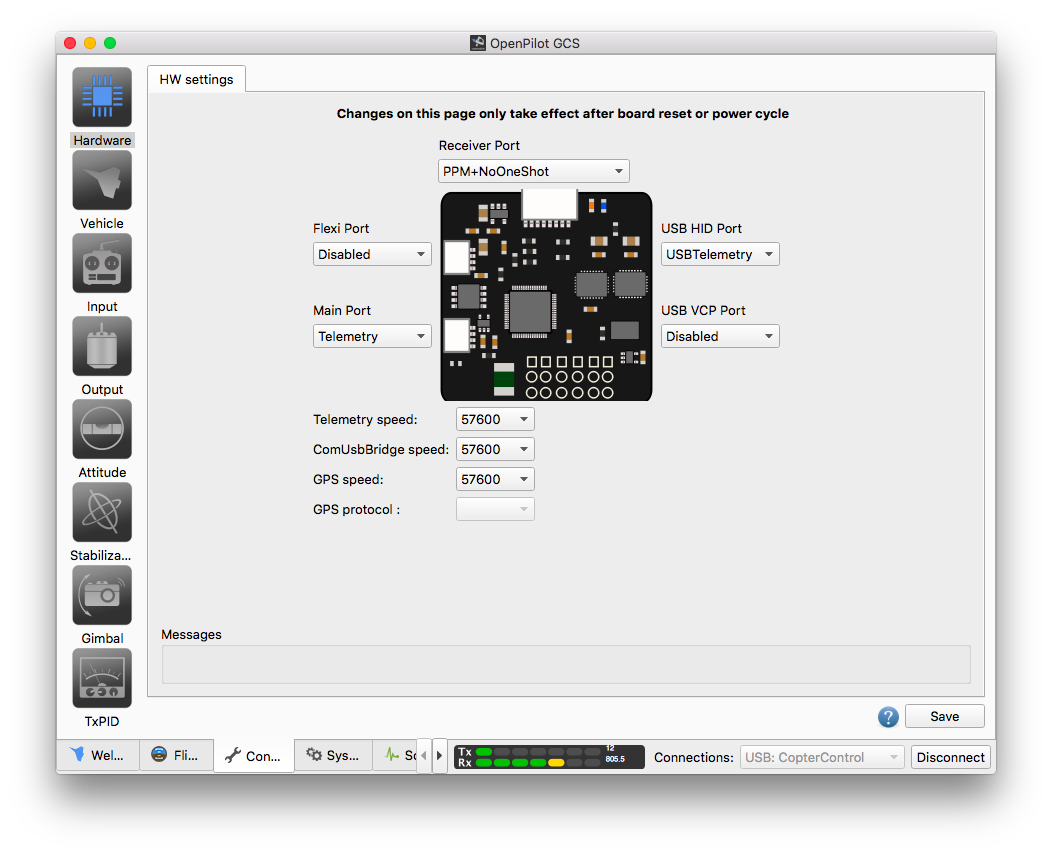
Receiver Portで使用する受信機からの制御信号とESCのOneShotの対応の有無を選択します。本機に搭載されているESCはOneShot非対応なのでここではPPM+NoOneShotを選択します。
Inputのアイコンをクリックし”Flight Mode Switch Settings”のタブを開きます。
右上の Flight Mode Count を3にします。これで3つの異なるフライトモードが利用できます。
Pos.1〜3を上記に通り設定します。
CC3Dではパラーメータの組み合わせをSettings Bank1-3の3つの組を登録しておくことができます。上の例では各モードに対して Setting Bank2に設定したパラメータセットを利用する設定となっています。
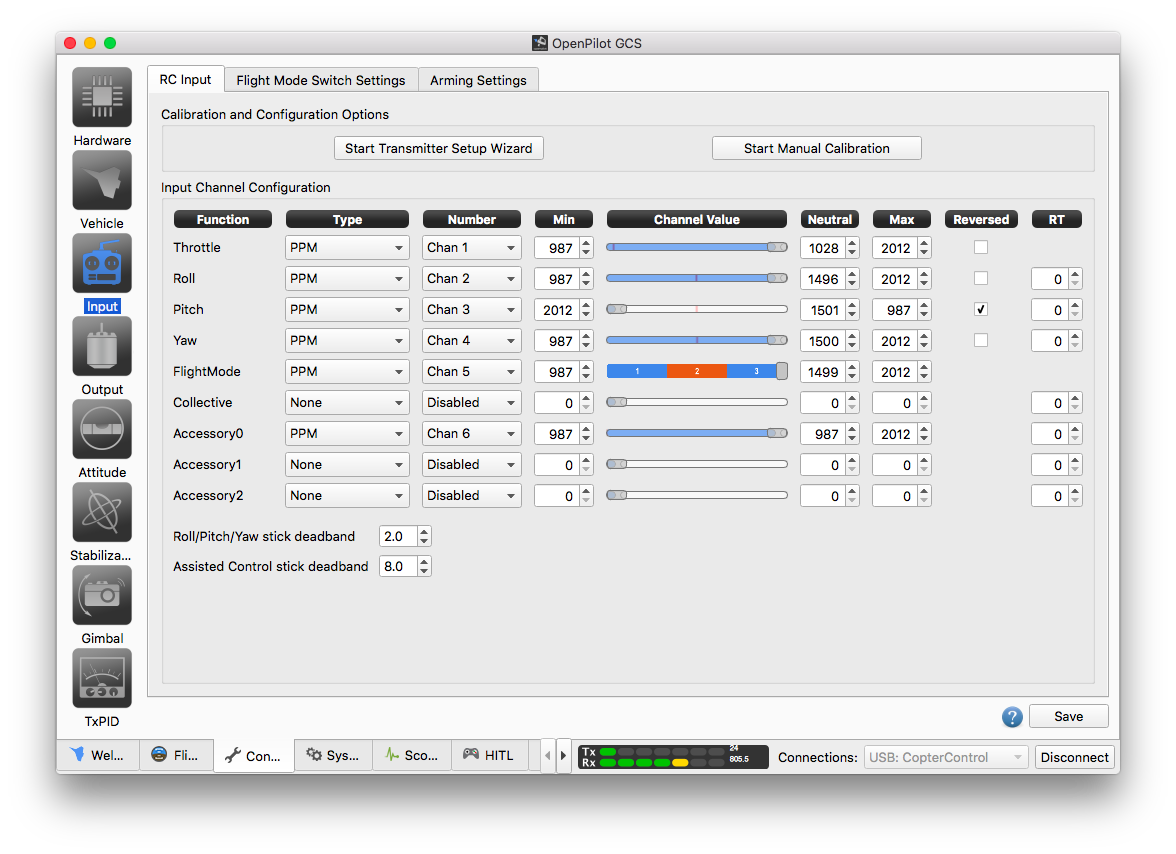
次に同じ上部のRC Inputタブをクリックしてプロポのスティック動作とクワッドの各動作の設定を行います。これは左上にある Start Transmitter Setup Wizardをクリックしその指示に従ってスティックを動かすことでほぼ自動で設定されるかと思います。
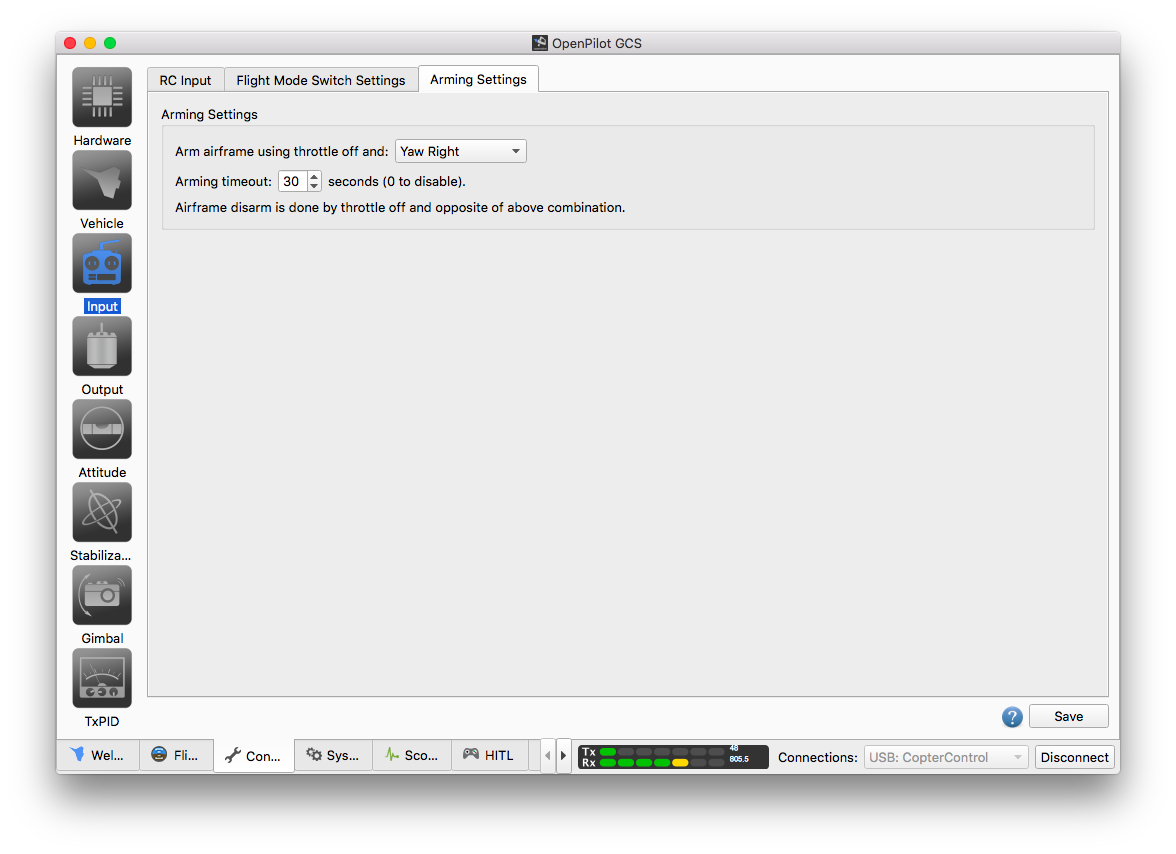
Arming Settingタブをクリックしてアーミング(モーターのON/OFF)の設定をします。
上記ではYaw Rightとして、スロットルを最小、ヨー(機首方向)を右に入れた状態でモーターがOnになるように設定しています。また30秒後でOFFになるようにデフォルトで設定されています。
5 受信機のフェイルセーフ機能の設定
受信機が送信機(プロポ)からの操作信号を受信できなくなった際に自動的にモーターをオフにするための設定を行います。以下ではDelta-8の場合の設定要領を記載します。各受信機毎の設定要領についてはそれぞれの説明書を参照してください。プロペラを取り付けたまま作業を行うと危険ですので必ずプロペラを外した状態で行います。送信機の電源を入れ、機体のバッテリーを接続した状態でスロットルをあげて各モーターが回転することを確認します。ある程度モーターが回転している状態で送信機の電源を切ります。フェイルセーフの設定がされていればモーターは停止しますが回転を続ける場合はフェイルセーフの設定が必要です。再度送信機の電源を入れ受信機とのリンクを確立します。信号が受信できなくなった場合に設定したいスティックの状態(通常はスロットル最小その他はニュートラル)にします。この状態で受信機上部にあるフェールセーフボタン(リンク設定ボタンと同じ)を5秒間押します。フェイルセーフの設定が完了したら先ほどの要領でモーター回転中に受信機の電源を切りモーターが停止することを確認します。
6 PID設定
PID設定とは機体を安定させるための制御システムのProportional-Integral-Derivativeの各パラメーターに関する設定となります。PIDは各機体の設定やバランスによって変わってくるのでそれぞれの機体毎にチューニングをしなければなりませんが他の機体の設定を参考とすることができます。下記は私の機体でののPIDとなります。(5030プロペラ、3S1300mAバッテリー使用、Mobius Action Cam搭載)
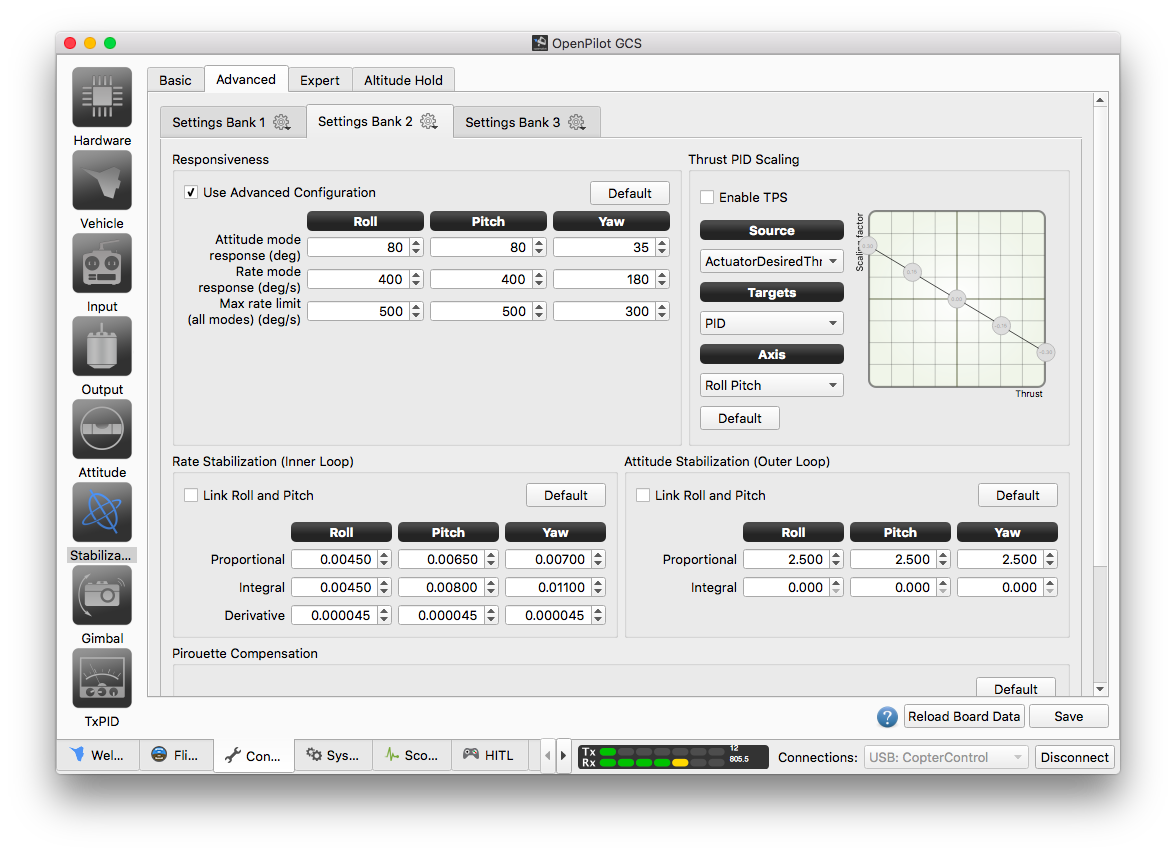
この画面ではまず使用するSetting Bankのタブを選択し、さらに上部のタブからAdvancedを選択します。
Responsivenessでは各モードにおけるRoll, Pitch, Yawのスティック操作した場合の動作の速度を設定します。Use Advanced Configurationをチェックしておきます。
PIDの設定は左下の Rate Stabilization (Inner Loop)で設定します。
PIDのチューニングの詳しい説明は別途設けたいと思いますがチューニングの大まかな要領としては Roll と Pitchに関してP→I→Dの順で設定をしていきます。数値が高いと安定しますがPとIが高すぎると振動が発生するので少し戻します。低すぎる値では不安定になります。Dに関しては大きくすると安定はしますが反応が遅くなります。こらについて設定を変更しながら何度も試験飛行をしながらチューニングを行うこととなります。チューニングの飛行の際はrateモードここではPos.3 で実施します。
7 試験フライト
バッテリーを設置する場所は前後に動く可能性があるので底部分に両面テープを貼るなどしてバッテリーが飛行中に動かないようにしておきます。
本体上部の赤いスイッチを短く押すとOSDの表示位置が変更できます。上部に表示されると空の色に溶け込んで見にくい場合は多いので9回ほど押して一番低い位置に表示するのが見やすいかと思います。このスイッチを長押しするとFPV送信機の周波数を変更することができます。
初めまして。Eachine Racer 250は気になっているんですが、付属のVTXはデータシート等探しても出てこないですが開局実績はあるんでしょうか?ご存じありませんか?
もしくは開局実績のあるTS5823等に交換することはスペース的に可能ですか?
こんにちは。こちらのVTXについては「600mW /7ch/RTC-6705/RTC-6659/5V」で開局申請を出して認証がおりました。スペースは本体上部が空いていますので送信機を載せ替えることも比較的容易かと思います。
GPSは付いてますか
Eachine Racer 250 についてということでしたらGPSはついていません。レース用途を想定したものにはほとんどGPSのついたものはないかと思います。(Walkeraにはついているのがあるようですが、、、。)