[受信機との接続]
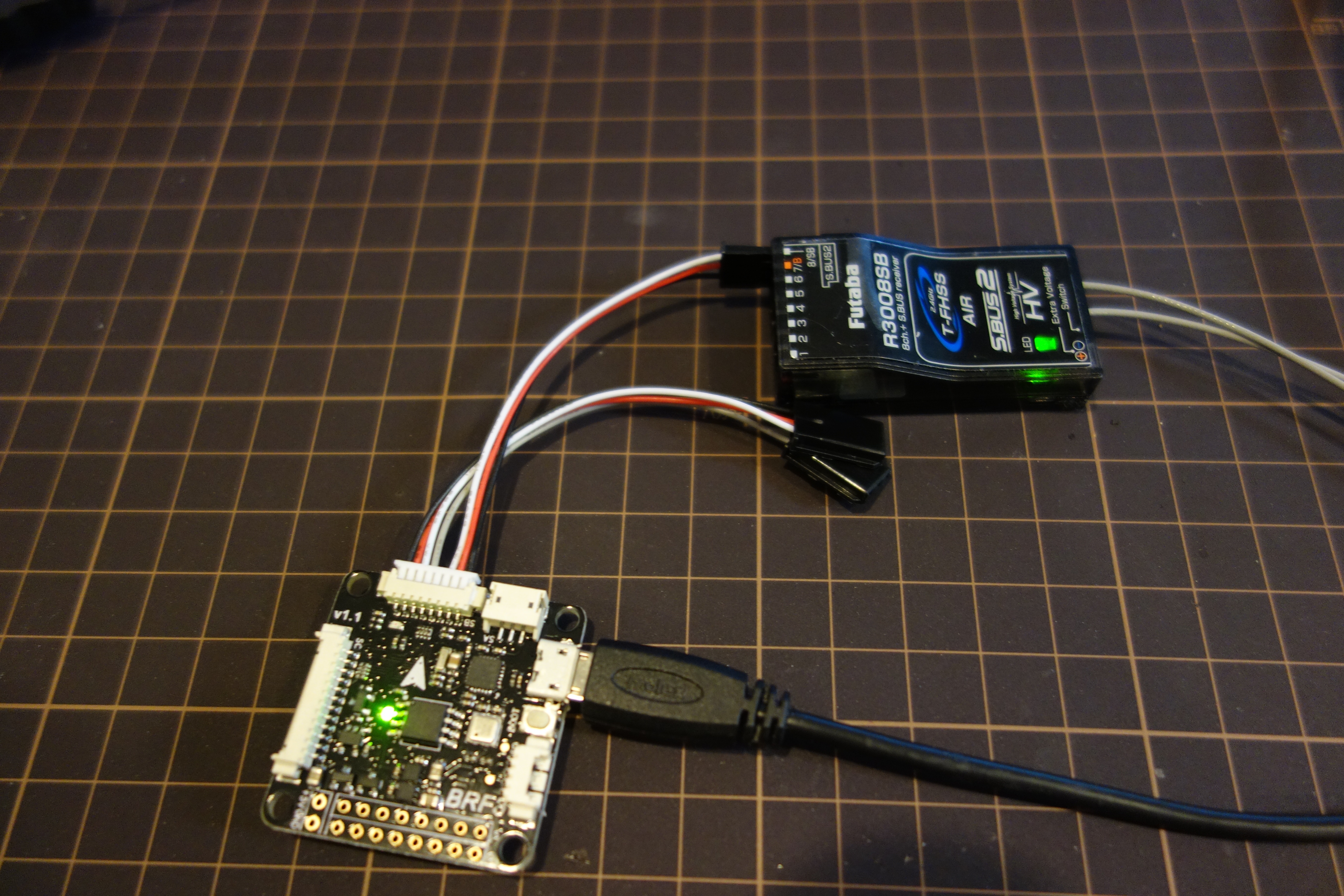
受信機はBeerotorF3のSBポートに接続された専用のケーブルを用いて行います。FCに向かって左側3本からSBus接続用のコネクタ、右側3本がPPM接続用のコネクタ、中央のグレーは受信機からのRSSI信号用のコネクタとなっています。
ここではフタバのSbus出力を持つ受信機を接続するケースを紹介します。FCに向かって左側3本につながっているコネクタを受信機のSbus用出力ポートに接続します。BeerotorF3とパソコンをUSBを接続するとFC経由で5Vの電源が受信機に提供されますので受信機と送信機のリンクを行います。受信機と送信機とのリンクの方法は使用する送信機毎に異なりますので説明書等を参考に設定を行ってください。
フタバのR3008SBの場合、T-FHSS Air方式ですので送信機のモデルセレクト画面からRXとしてT-FHSS Airを指定します。この状態で受信機の電源をONにする(USBを接続する)と受信機のLEDが赤色から緑色に変わり送信機のLINKの欄にIDが表示されればリンクが完了です。これで受信機からフライトコントロラーへ信号が送れる状態となります。
[基本設定]
ここではフタバの送信機に対応しSbusを出力する受信機をBetaflightに接続する場合の基本的な設定要領を記載します。
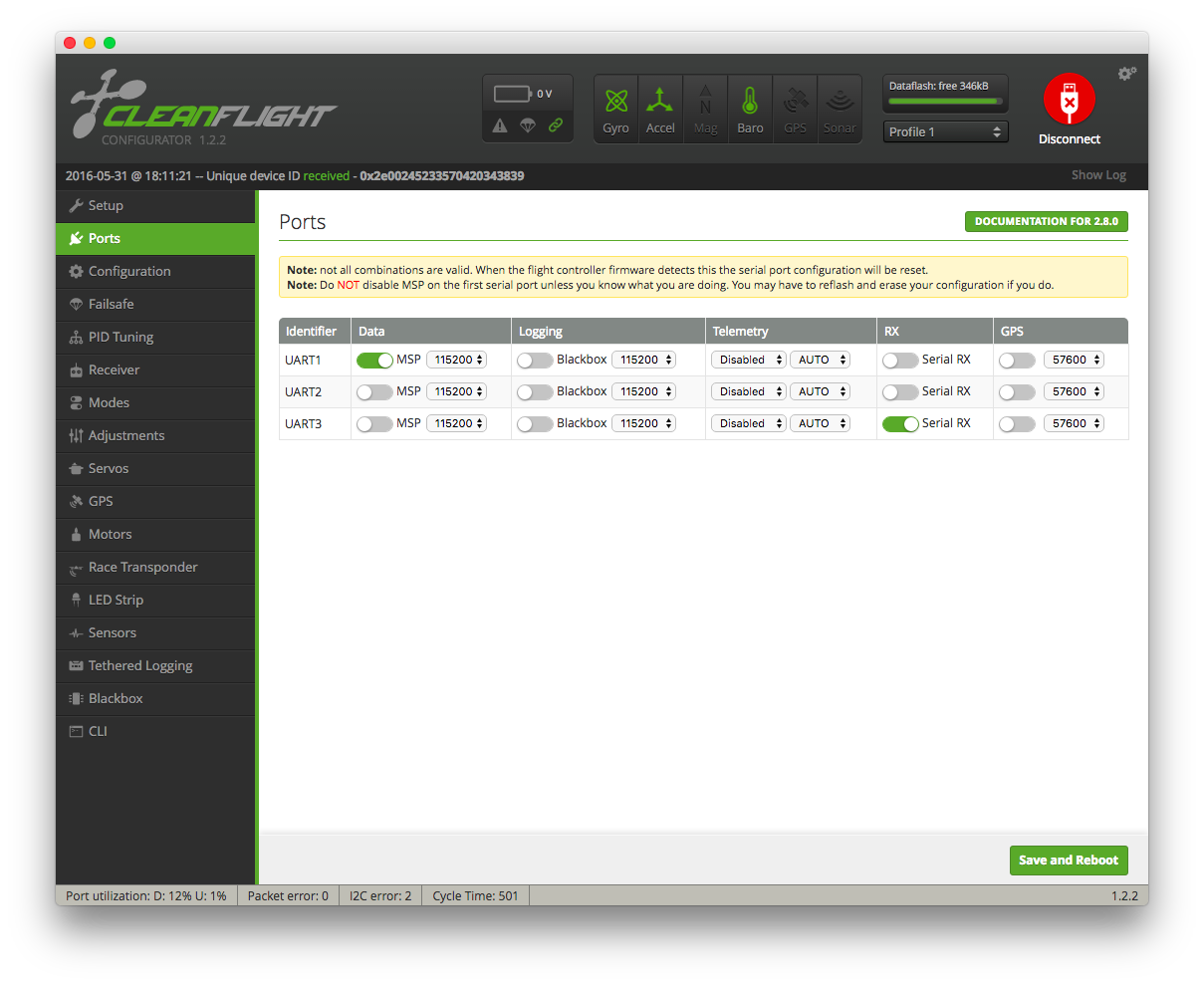
メニューからPortsを選択します。
BeerotorF3はSbusをUART3で受信する仕様となっていますのでPortsの設定画面でUART3のSerialRXをONにします。(Sbusで受信機からの信号を受け取る場合、PPMの場合は不要。)
右下の「Save and Reboot」をクリックし設定を保存します。
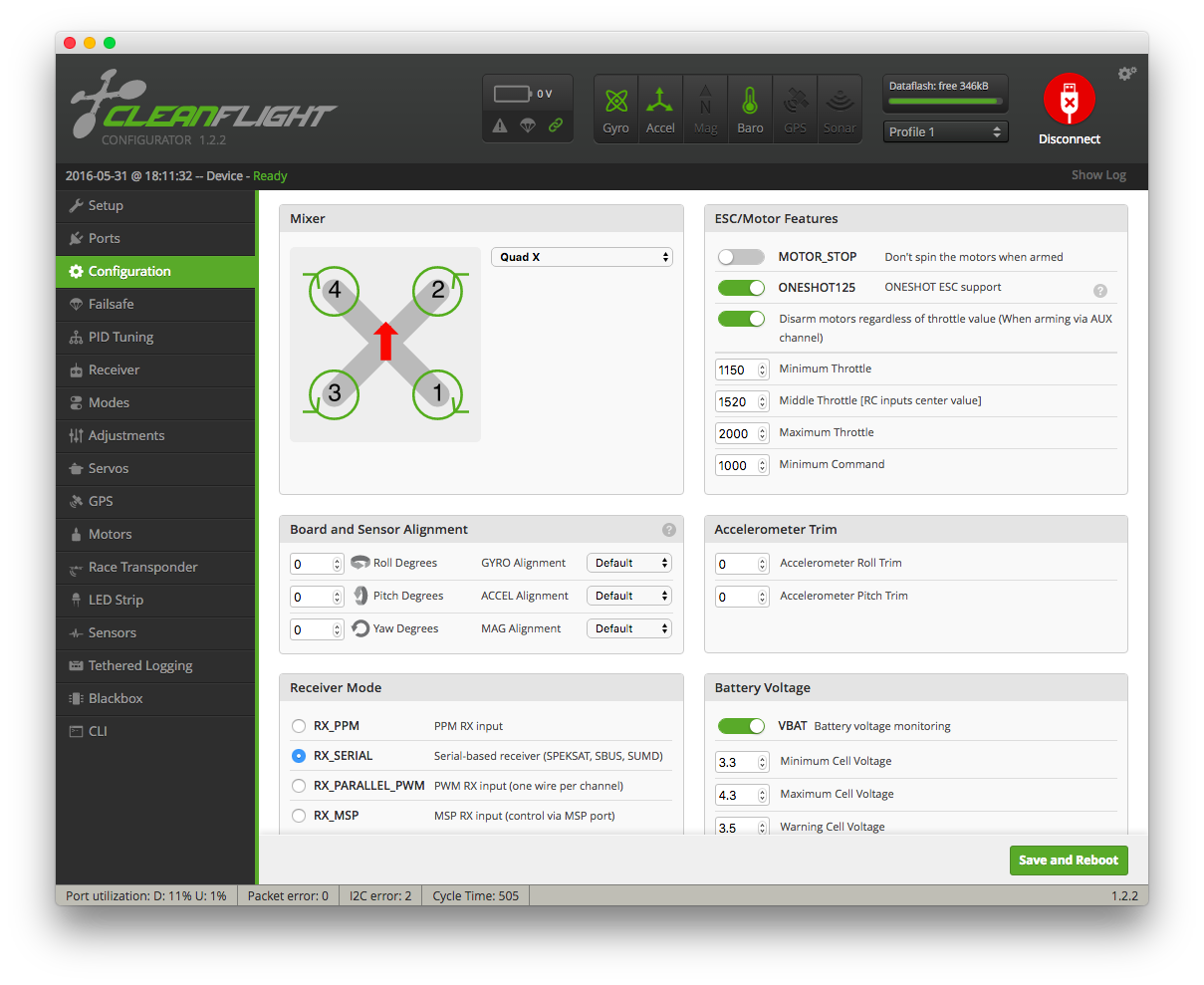 メニューからConfigurationを選択します。
メニューからConfigurationを選択します。
フタバの送信機を使用している場合はMiddle Throttleを1520に設定します。
Maximum Throttleを2000に設定します。(制御のための余裕をもたせてデフォルトの1850程度とするのが良いという意見もあります。私はモーターの最大出力を出せるよう2000に設定しています。)
Minimum ThrottleはESCのキャリブレーション後に設定します。
MOTOR_STOPをONにするとアームした状態でモーターを停止することができるのですがアームした状態に気づかずスロットルが体に触れてモーターが回転してしまうなど事故の原因ともなりますので私はMOTOR_STOPをOFFにしています。
Sbusを使用しますのでReceiver ModeをRX_SERIALを選択します。
Serial Receiver ProvideとしてSBUSを選択します。
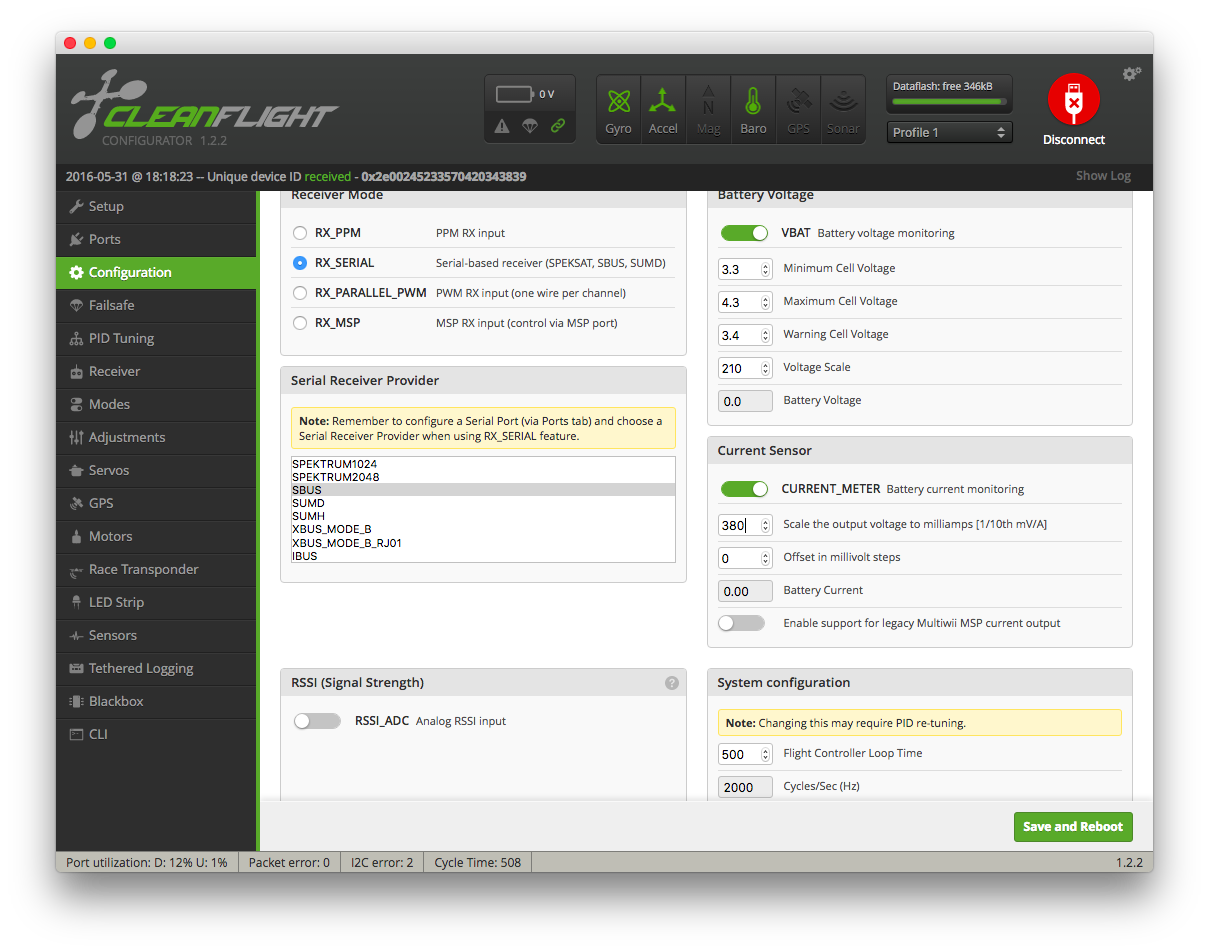
Battery VoltageのVoltage Scaleを210に設定します。(BeerotorF3固有の補正値)
電流をOSDに表示する場合はCURRENT_METERをONにします。
Scale the output voltage to milliampsを380に設定します。(BeerotorF3固有の補正値)
右下の「Save and Reboot」をクリックし設定を保存します。
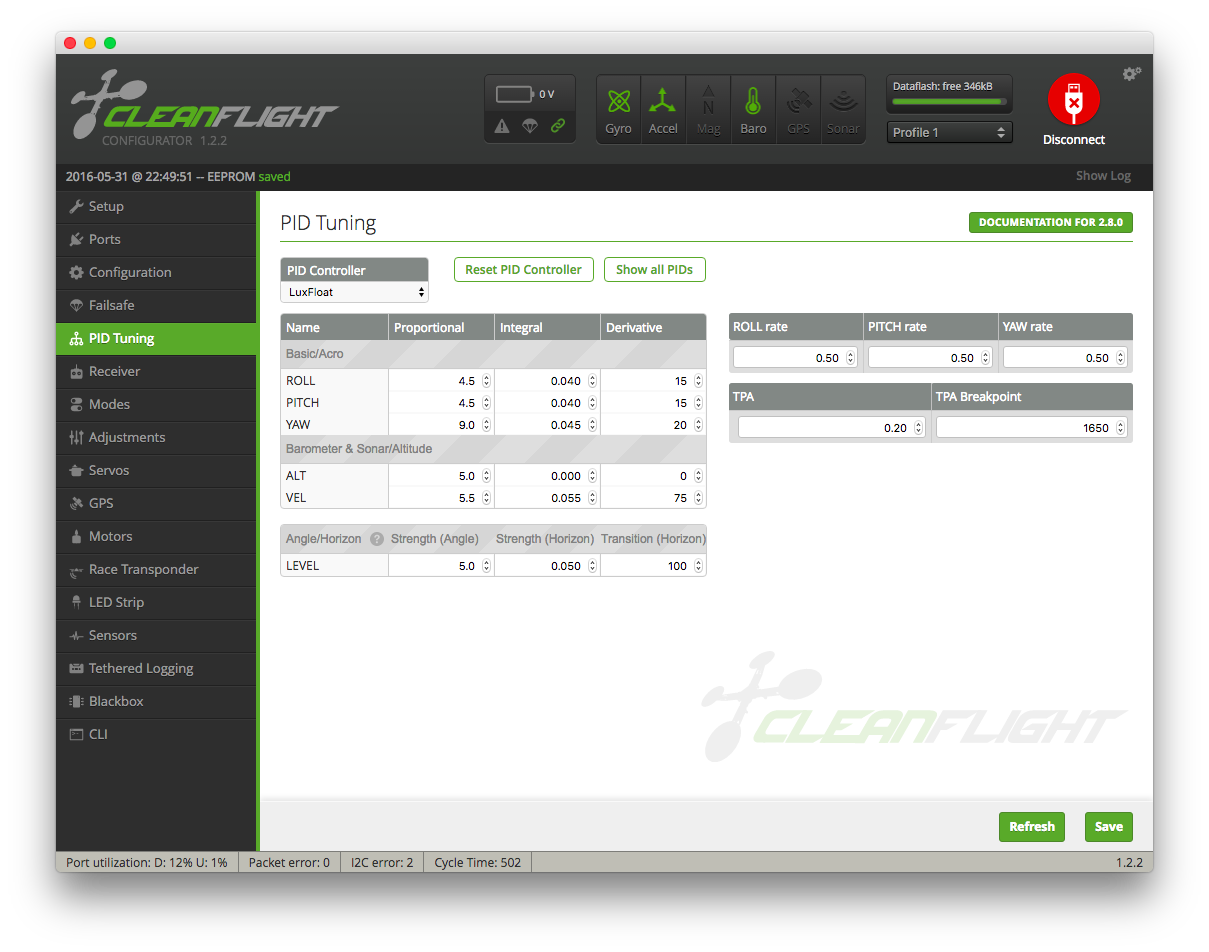
メニューからPID Tuningを選択します。
PIDの調整は実際に飛行するようになってから行いますがここでは使用するPID Controllerを選択します。ここは好みで指定すれば良く安定した無難なものが良ければデフォルトで設定されているMulti Wii Rewriteで良いかと思います。F3プロセッサのメリットを享受するにはLuxFloatを選択します。
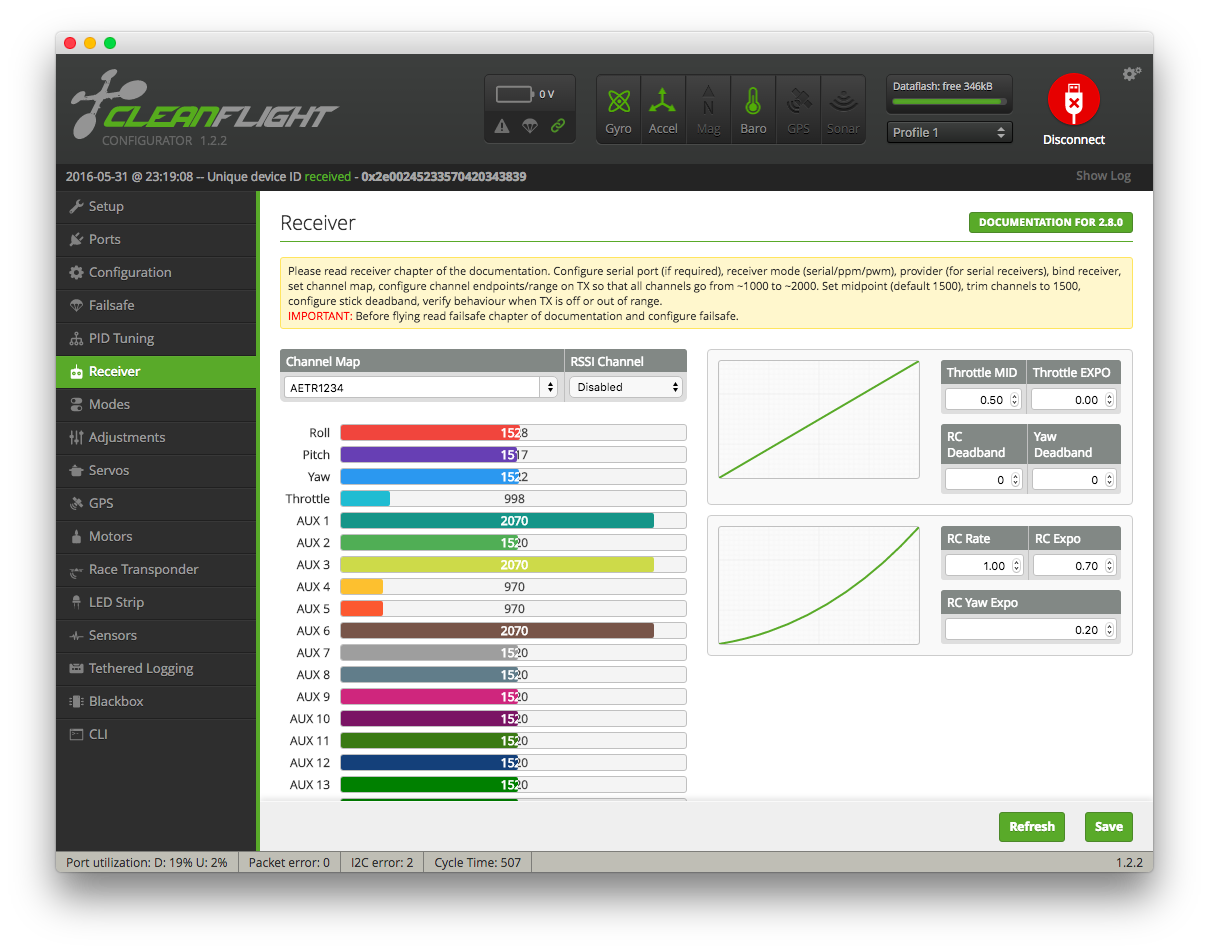 メニューからReceiverを選択し送信機のスティック操作に関する設定を行います。
メニューからReceiverを選択し送信機のスティック操作に関する設定を行います。
まず左上のChannerl Mapで各スティックと機体動作の対応付けを行います。
フタバ製送信機Mode2マッピングの場合は「AETR1234」となります。
AETRは飛行機でいうエルロン(Aileron), エレベーター(Elevator), スロットル(Throttle), ラダー(Rudder)の操作に対応します。
次に送信機側のエンドポイント設定によって各スティックに対応する出力が最小値1000から最大値2000程度になるようにプロポのエンドポイントを調整します。
設定が終わったら右下の「Save」をクリックして設定を保存します。
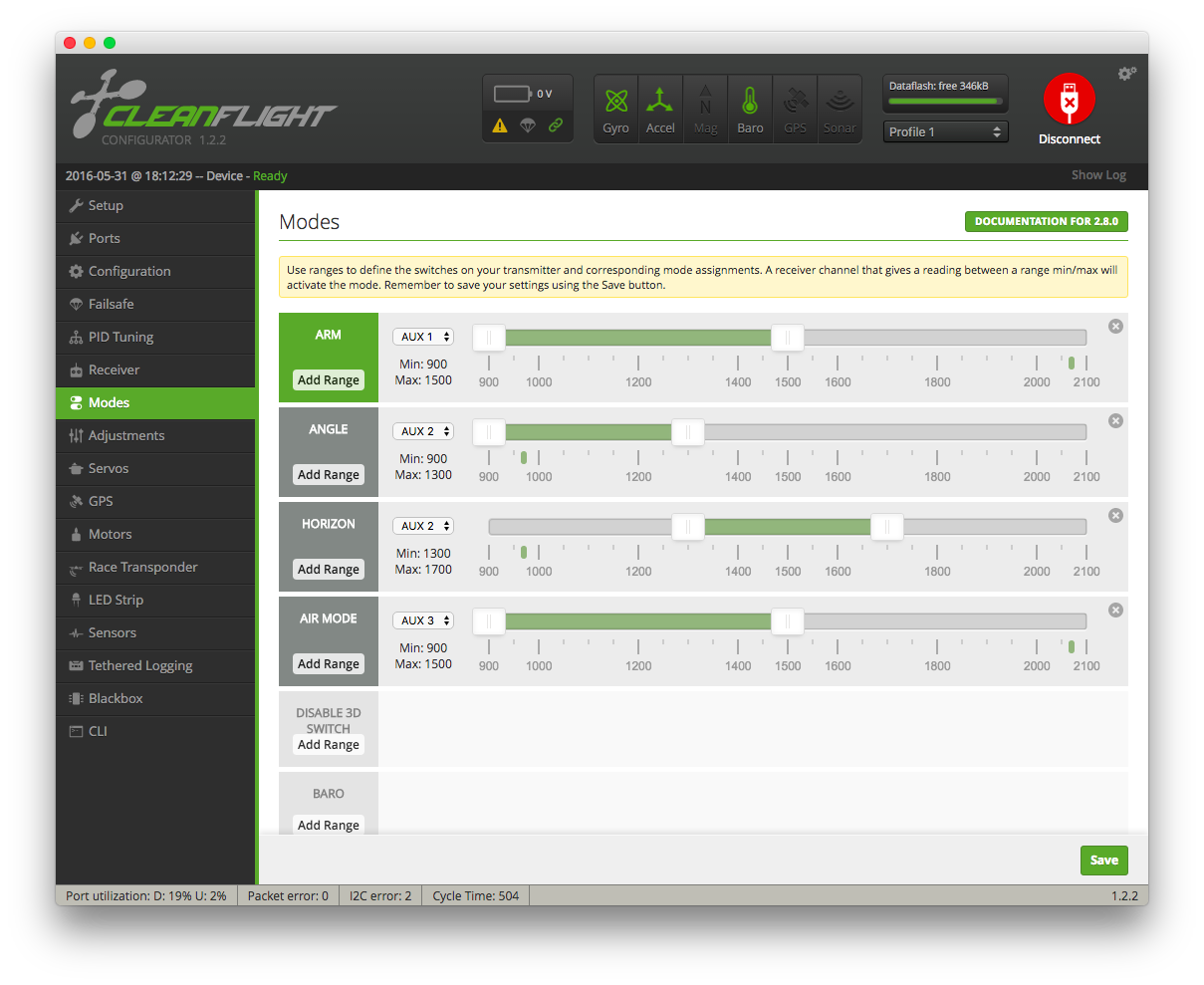 メニューからModesを選択します。
メニューからModesを選択します。
ここではアーミング(モーターのメインスイッチ)、フライトモードの変更、エアモードのスイッチ、機体発見用ブザーのスイッチを設定します。
送信機側の設定で
AUX1
AUX2
AUX3
AUX4
に上記に使用したいスイッチを指定します。
 対応する各AUXを用いて各モードがONとなる範囲を設定していきます。
対応する各AUXを用いて各モードがONとなる範囲を設定していきます。
ANGLE, HORIZONは自動的に飛行を安定させる制御を行う飛行モードとなりANGLEがより安定したモード、HORIZONが中間、このどちらでもない状態がACROモードとなり機体の安定制御を行わないモードとなります。レースドローンは基本的にこのACROモードで飛行させるのが一般的です。
エアモードはスロットルOFF(1000)の状態においても機体の姿勢のコントロールを可能とするモードで空中でスロットルオフを多用するフリースタイルの飛行で主に使用します。
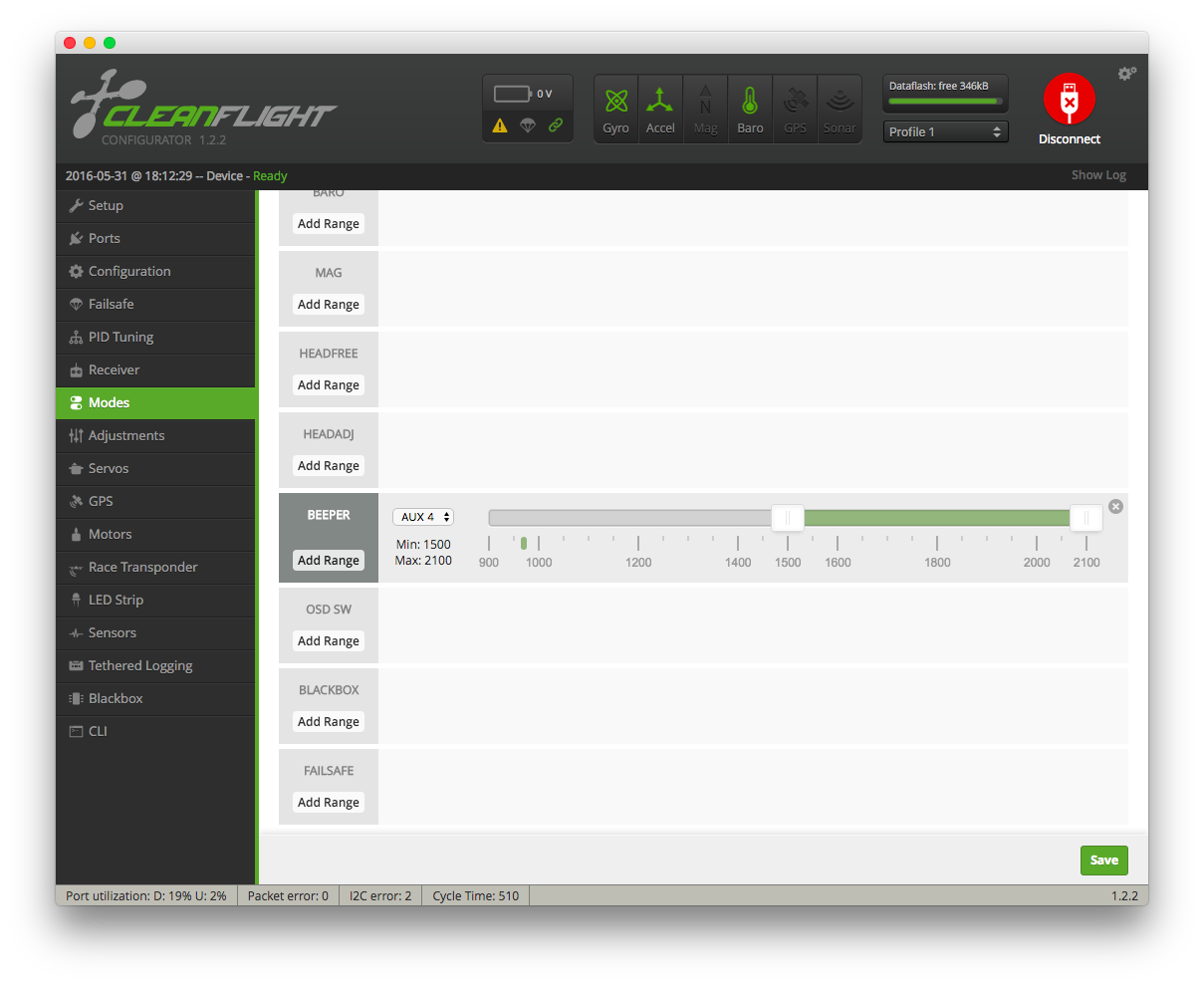
ブザーは機体捜索時などにブザー音を発生させるために使用します。
設定が終わったら右下の「Save」をクリックして保存します。
以上で基本的な設定は終わりです。この後OSDの設定及び機体の組み立てを行います。
大変参考にさせてもらってます。
いつも役に立つ記事をありがとうございます。
私もBeeRotorF3を買ってセットアップしてみましたが、RSSI信号が取得できません。
RxはS-FHSSのR2008SB互換品でSBUS接続しています。
cleanflightのドキュメントを読み漁りましたがどうしても分かりません。
このRxはCC3DではRSSIが取得できるのですが、BeeRotorF3では取得できないのでしょうか。
何かご存知でしたら教えてください。
さとるさん
ご丁寧にコメントをいただきありがとうございます。
お返事が遅くなり失礼しました。
nobさん
ご質問ありがとうございます。
私はRSSIの表示をしていないので実際に動作を確認したわけではないのですが、
https://github.com/cleanflight/cleanflight/blob/master/docs/Rssi.md
こちらを見るとCleanFlight でPPMでRSSIを受け取る方法、PWMで受け取る方法、ADCで受け取る方法がそれぞれ記載されています。
ADCの場合はBRF3ではSB5番がRSSI用の入力として指定されていますのでRSSIを受け取ることは可能かと思います。
http://rctimer.com/download/BeeRotorF3Manual.pdf
ADCの場合は”The signal must be between 0v and 3.3v. Use inline resistors to lower voltage if required; inline smoothing capacitors may also help.”とあり電圧の調整が必要かもしれません。あとADCの場合はCleanFlightのConfig画面で設定をONにする必要もありますね。
私も実際に試していないので、これら全てご存知の内容かとは思いますが何か進展がありましたら是非お教えください。
お返事いただきありがとうございます。
残念ながら私の受信機はSBUS端子しかありません。
SBUS-PPMコンバータを入れようにも機体スペース的に無理があるので、
RSSIのモニタリングは断念することにします。
いろいろ調べていただきありがとうございました。
今後も有用な記事を期待しています!
いつも参考にさせて頂いています
これまで、CC3DをFCにLibrepilotを使っていましたが、SPRacingF3を購入しましたので、Cleanflightに変更使用と考えています。
FCには、Bataflight301を書き込みました。
CleanflightのPIDタブでLuxfloatに設定使用としたところ、全てのPID値がグレーアウトして設定出来ません。
他に何か処置する所があるでしょうか?
おやじぃさん、お返事がすっかり遅くなってしまい申し訳ありませんでした。
Betaflightの設定にはCleanflightのGUIを使われているのでしょうか?
もしそうであればBetaflightのGUIが出ていますのでそちらを使った方が良いかもしれません。
Betaflight3.0 以降ではBetalfight PID が導入されてこれがLuxfloatの機能をさらに発展させたものを含む形となっているようですのであえてLuxfloatを選択する必要はないようです。
ご教授ください。
BeerotorF3のOSD設定についてですが、電圧や気圧?などは表示されるのですが、ホライゾンバーやコールサインなどが表示されません。
MWOSD R1.6で設定しております。なにか原因があるのでしょうか?
コロリさん
コメントの確認が遅くなり申し訳ありませんでした。
R1.6はもともとインストールされていたものからファームを変更をされていますか?
表示レイアウトの変更をしない場合でも表示されませんでしょうか?
私はインストールされていたものをR1.5のGUIで設定しておりますが特に問題は発生していません。
FPVドローンラボ 様
いつも参考にさせていただいております。
現在200g未満の機体を作成しようと、BeeRotor130を作成中です。
BeeRotor130のフレーム(ブザーの載った専用PDB付属)、FCはBRF3、1306のモーター、またESCと買い集め、奮闘しております。製作には、須磨模型さんとかのブログなども参考にしながら、組んでクリーンフライトで設定など済ませ、飛ばすところまでは漕ぎつけましたが、ブザー設定がまずいのか、リポをつなぐとブザーが鳴りっぱなしです。
BRF3での配線も専用PDBから配線、SCポート6番に茶色のブザー線入れてます。(7番にはLED TRIPの白線を入れてます)
また、クリーンフライトのBEEPERの設定もON,OFFの範囲
内でAUXスイッチは反応していますが、音が鳴りっぱなしです。他に必要な配線とかあるのでしょうか。
ちなみに、BUZZERもLED TRIPも6番に茶色線、7番に白線が入っているのみで、ポート説明にある5番BUZZERのPWR5V線、8番9番のLEDのPWR5V,GNDは配線しておりません。(他の方の配線を参考にしていますが)
分かりにくい説明で申し訳ありません。
ちなみに、LED TRIについても配線はこれから挑戦するのですが、ご教授いただければ幸いです。
ニシカワ
ニシカワさま
お疲れ様です。
SC端子「PWR_5V」をブザーのプラスに「-Buzzer」をブザーのマイナスに接続すれば大丈夫かと思いますがいかがでしょうか?
端子の位置等はこちらを参考にしてください。
https://nathan.vertile.com/blog/2016/02/03/rctimer-beerotorf3-flight-controller/
早速にご返事いただき、ありがとうございます。
元からPDBに載っているブザーが無駄にはなりますが、一度試してみます。
ありがとうございました。