
現在私が住んでいるボストン郊外でFPVレースイベントが開催されることに開催2日前に気がついて慌ててエントリーをして参加してきました。ボストン周辺でも年に数回ドローン関連のミートアップ等が開催されることはあるのですがFPVでのレースを開催するのは初めてではないかと思います。
今回のレースの企画と告知はMultiGP( http://www.multigp.com/ )というサービスの枠組みを使用して行われました。MultiGPは各地で開催されるドローンレースの運営を支援し、レースの結果をスコア化して参加メンバーで成績を競います。レースの開催に必要なレースの企画者はそのサービスを利用して参加者を募集したりレース運営のノウハウの提供を受けたりするようです。
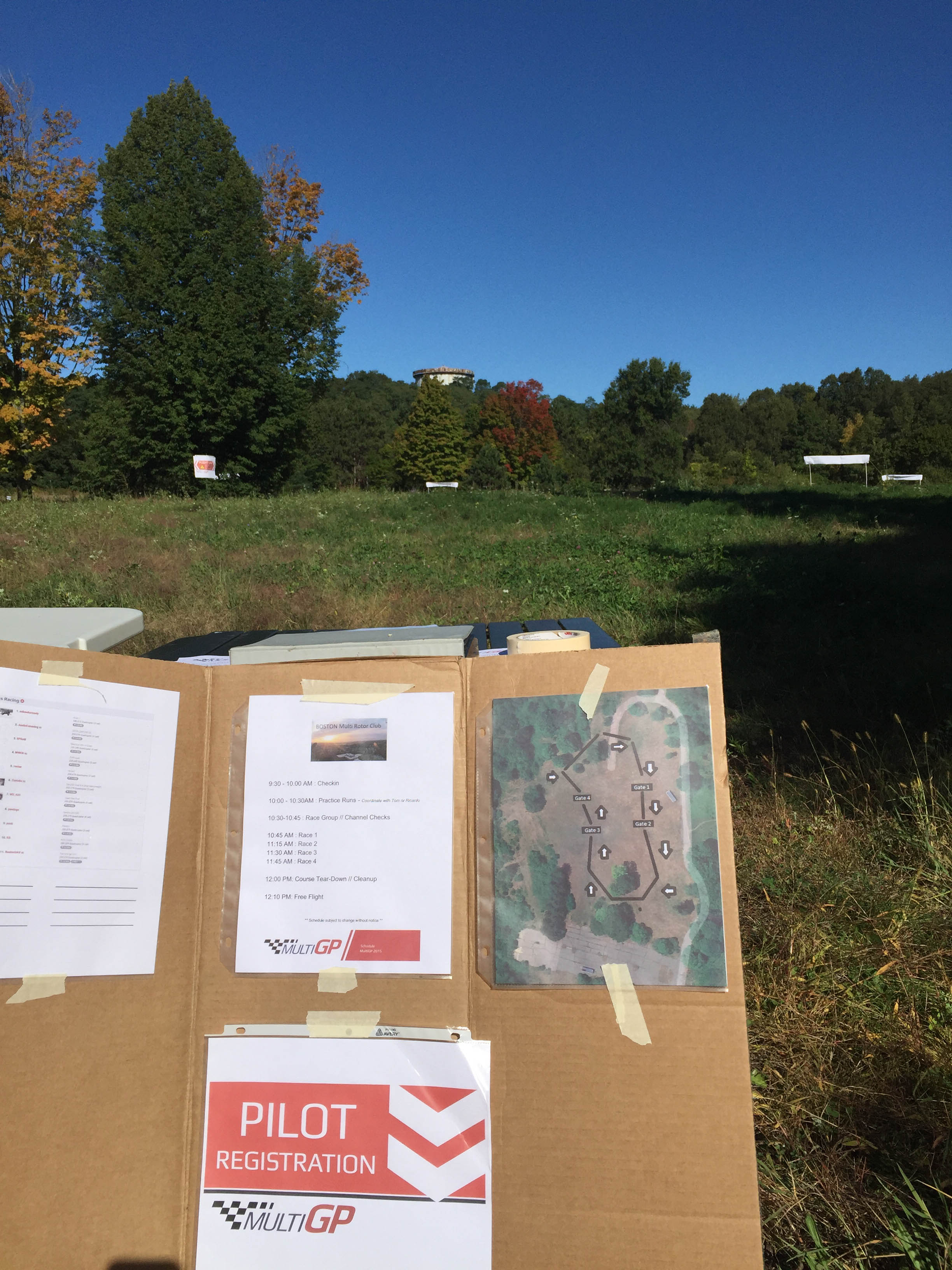
レース当日は晴天で風もなく非常に良いレース日和でした。アナウンスのあった登録開始時間より少し後に会場に到着するとまだコース設定の最中でした。ゲートの設置を手伝いました。ゲートは50cmほどの鉄筋の棒を地面に打ち込んでそこに塩ビのパイプを刺してコの字型に組み合わせ上部に模造紙を貼るという質素な手作りのものでした。一つ$15ぐらいで作れるそうです。

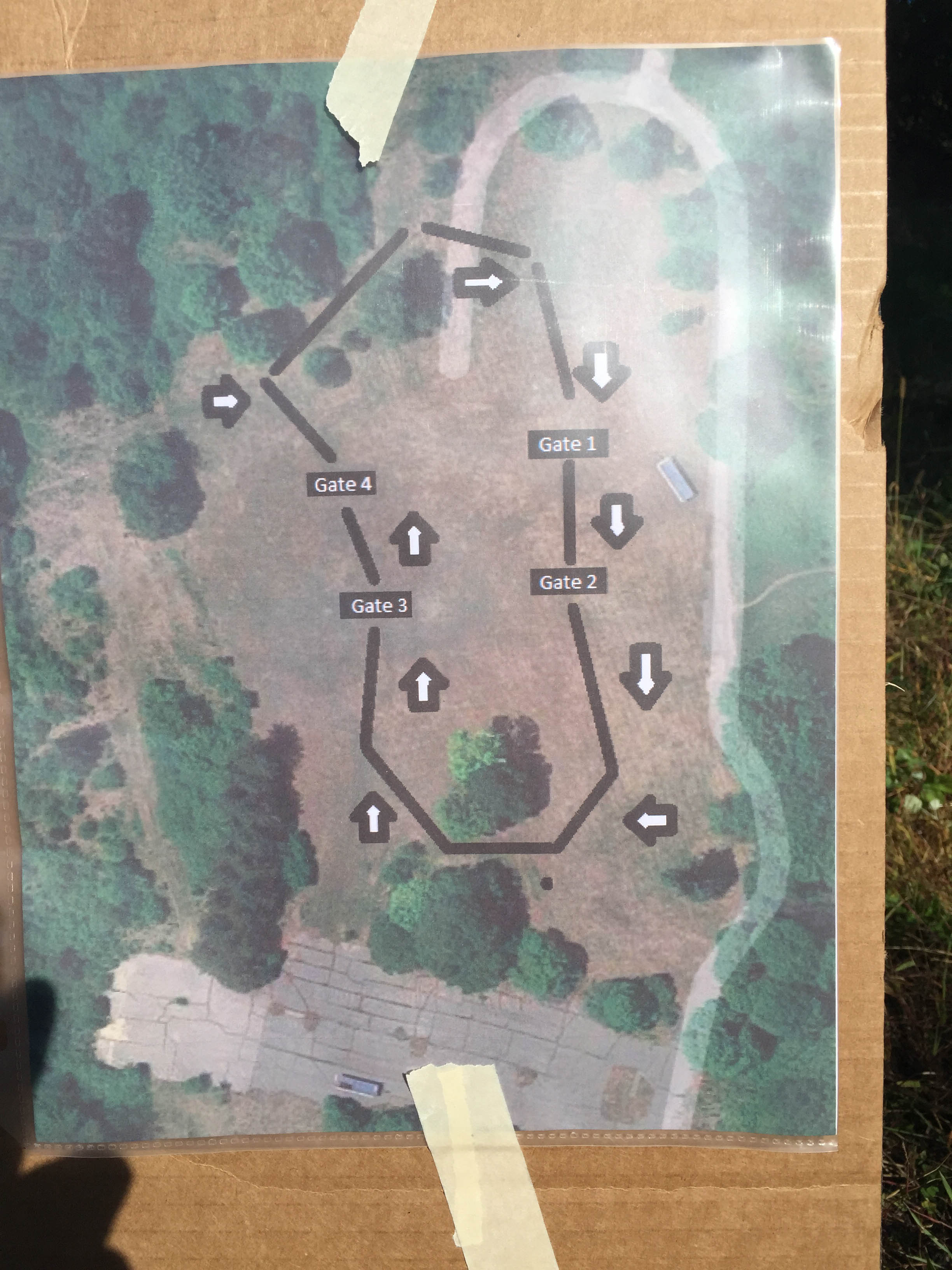
コースは時計回りのシンプルな周回コース、スタート後、まず大きな木を右に見て旋回して、ゲートを2箇所通過、そこで左に回り込んで木々の間を抜け、さらにゲートを2つ通過するというシンプルなコース設定です。
コースの設定が完了すると参加者の登録、機体インスペクション、FPV用の周波数の割り当てを行います。今回は私は安定した飛行ができるVortexでエントリーし、予備機としてQAV250も持って行きました。
今回エントリーしたパイロットは11名、ほとんどがFPVレース初参加という感じでした。エントリーが終わり、いきなりレース開始です。練習飛行の時間があるのかと思っていましたがまぁ特に厳密な順位を出したりしないようなので練習を兼ねたレースとして実施するとのこと。レースは4名または3名ずつ3つのグループに分かれ3Lapを3ラウンド実施します。まずは当該グループでFPVの混信がないかをチェック。それぞれ40Mhz以上離して周波数をセットしますが、1ラウンド目少しノイズが気になりました。そのまま飛ばすとやはり混信の影響で時々飛行中視界不良に見舞われました。2ラウンド目以降は別の周波数をもらってなんとかクリアな視界を得ることができました。
レースの結果は第1レース:全員完走できず(笑)一応一番長く飛べたので1位、第2レース:ゲート通過の際に背の高い草にひっかかり墜落、第3レース:他の選手が全員完走できず生き残りで1位という結果でした。

練習なしのいきなりレース本番だったため私も含めほぼ全員レース初心者ということもあって完走できれば勝ちということになってしまいました。その後、フリーエントリーのレース練習となり皆さん本番が練習(?)となり、実質的にはこちらがよりFPVレースらしいフライトとなりました。

最終的にはほぼ全員が3周程度は十分完走できるレベルとなっていました。今回は恐らくボストンエリアで初めてのFPVレースイベントとなり集まった人たちもそれぞれ個人かせいぜい少人数で練習をしている人たちだったようで、またこういったイベントや集まりを継続しようということで皆意気投合、まずはメーリングリストで連絡をすることとなりました。

今回初めてのレースセッティングに臨んだ感想としては、やはり当日同じコースでいかに練習して慣れるかが重要と感じました。初めてのコースで感覚をつかむのは難しく何度か飛行しているうちに適切なコース取りがわかるようになってきます。慣れるまではなるべくクラッシュを避けるために無理にゲートをくぐったりせずに少しずつ競技のスタイルに近づけて行くのが良いと思います。(分かっていてもつい無理をしてしまいます。)
また今回最大7機程度で同時にフライトをしましたがFPV周波数の設定が難しいく何度もトラブルの原因となりました。FPV送受信機はメーカー毎に周波数のチャンネル割り当てが違っており、また違うチャンネルでも周波数が近ければいくらか干渉が発生するので十分に(最低40Mhz以上)周波数を離しておくことが必要です。またスイッチでチャンネルを切り替える場合はチャンネルと対応する周波数がわかっていなければならず、これもメーカー毎に割り当てが違うため管理が大変です。その点VortexはOSDからの設定で異なるメーカーの受信機に対応したチャンネル設置が周波数の表示とともにできるため大変便利でした。
競技中、機体トラブルや設定ミスに悩まされている人が結構いました。一つのレースラウンドで出走できない人が一人ずつぐらいいたように思います。日頃から機体をよく整備しまた操作や設定に習熟し十分な工具を持ち込んでおくことが重要と感じました。また特にレースの早い段階ではその後のトラブルの原因にもなるクラッシュは何としても回避すべきと感じました。
今回のレースは個人の方の呼びかけで始まり、コースのゲート等は全て手作りでしたがそれなりにレースとして成立するものでした。ゲートは高さ1.8m程度ある大きなものでしたが、最初は私も含め皆ゲートをくぐるのに苦労していましたが最終的にはかなりスムーズにくぐれるようになりました。それぞれ木の間をくぐったりして練習はしていると思いますが、簡素なものでもレースセッティングで練習することがドローンレースを楽しむ上で重要と感じました。ということで何かしらマイゲートを入手しようと画策中です。
今回参加した皆さんについて言えることはかなりのエネルギーとお金をFPVレーシングクワッドにつぎ込んでいるようでした。毎日朝夕練習しているという人も結構いました。またそれぞれオリジナルの工夫をしたクワッドや関連機器を披露しあい、お互いに良い刺激になるだけでなく良い学びの機会にもなりました。レースは一人一人ではできませんし、この新しい分野で限られた情報や機会の中、実際に同じようなことに取り組んでいる方々と実際に会って話せるのはとても良いものだと感じました。